Point taken regarding the wide variety of specs and possible applications for a motor driver.
I would do what I have previously done when designing a CNC machine: take a survey of candidate uses and go backwards from there. As you note, the possibilities are too extensive to cover, the idea of engineering tolerance is needed.
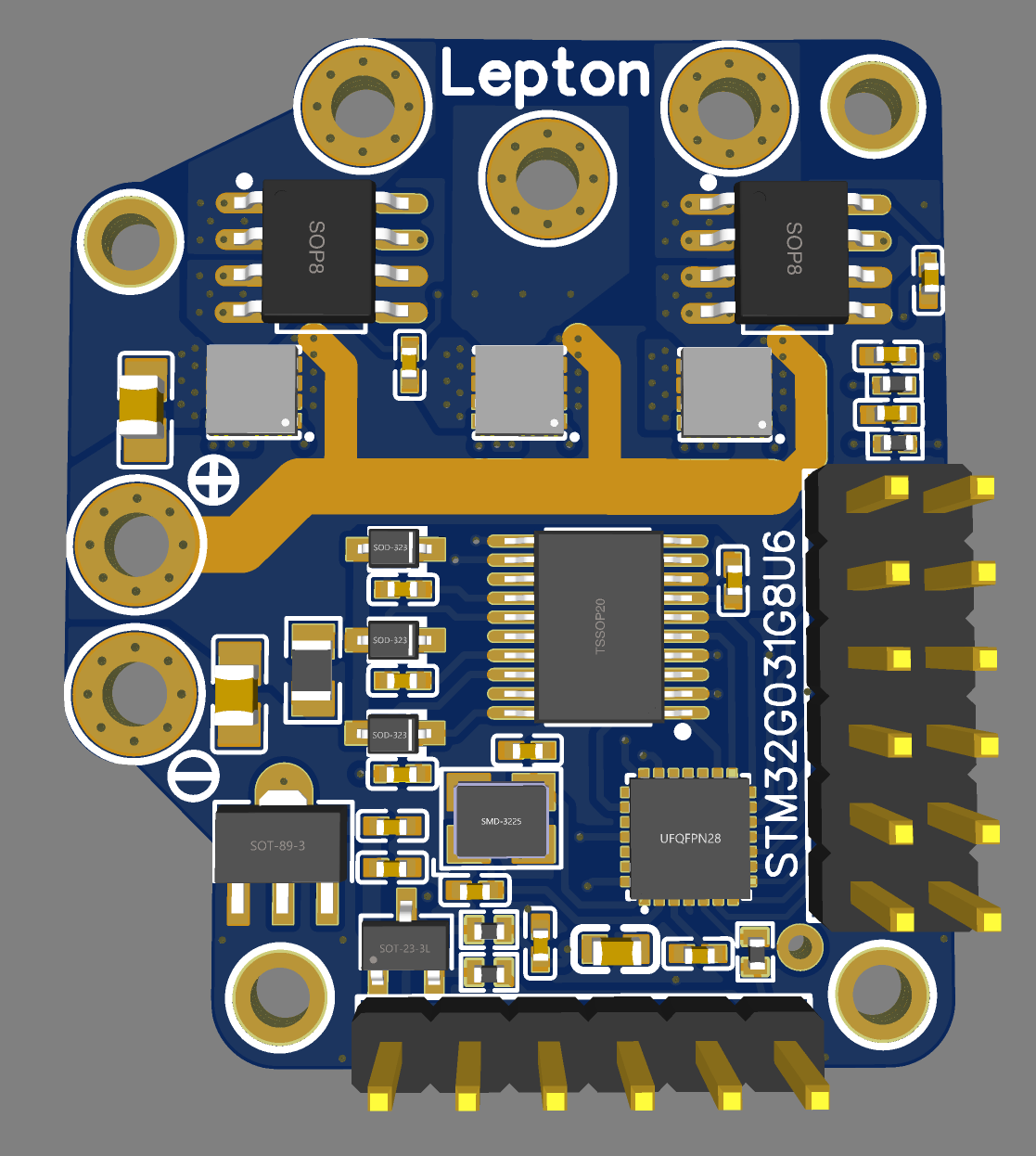
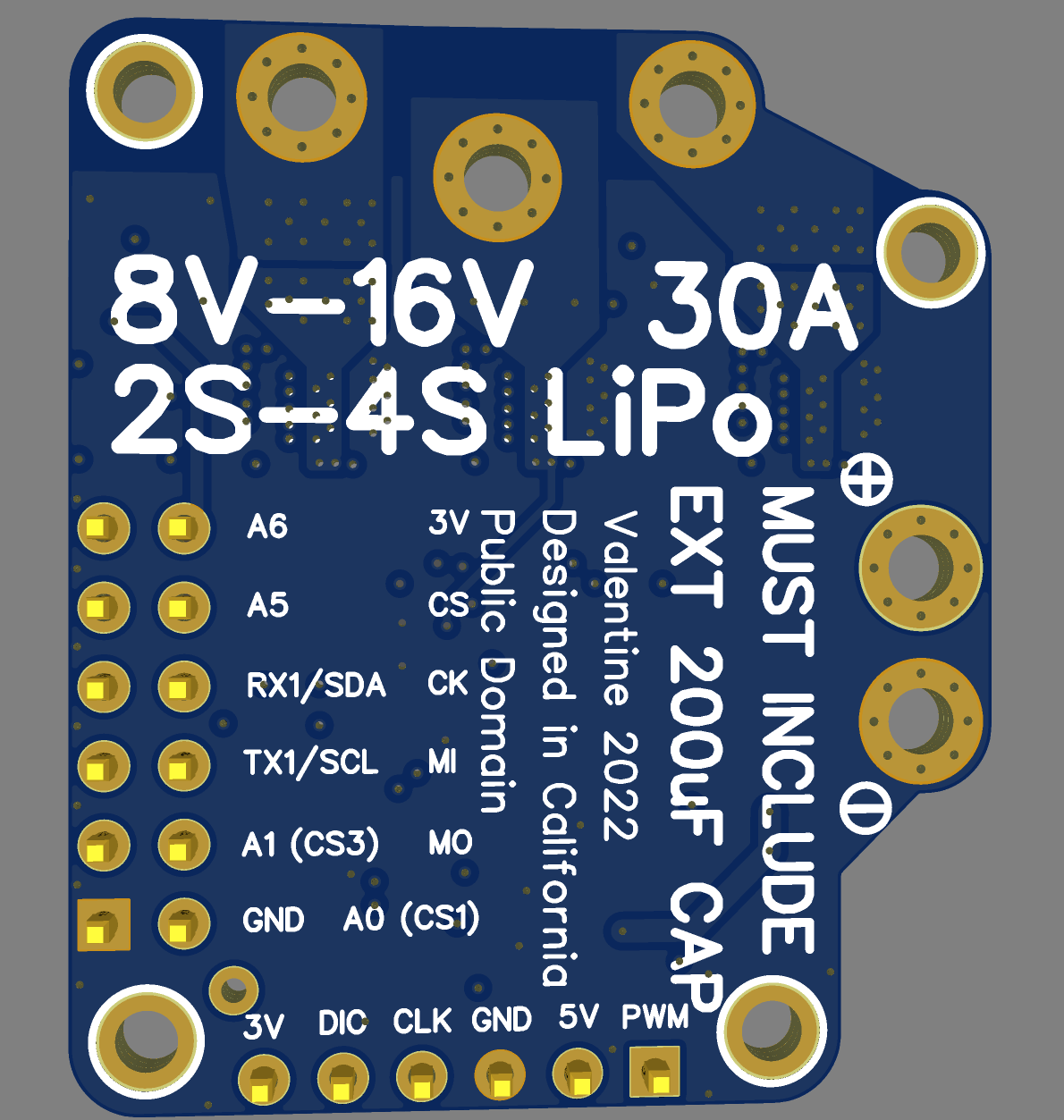
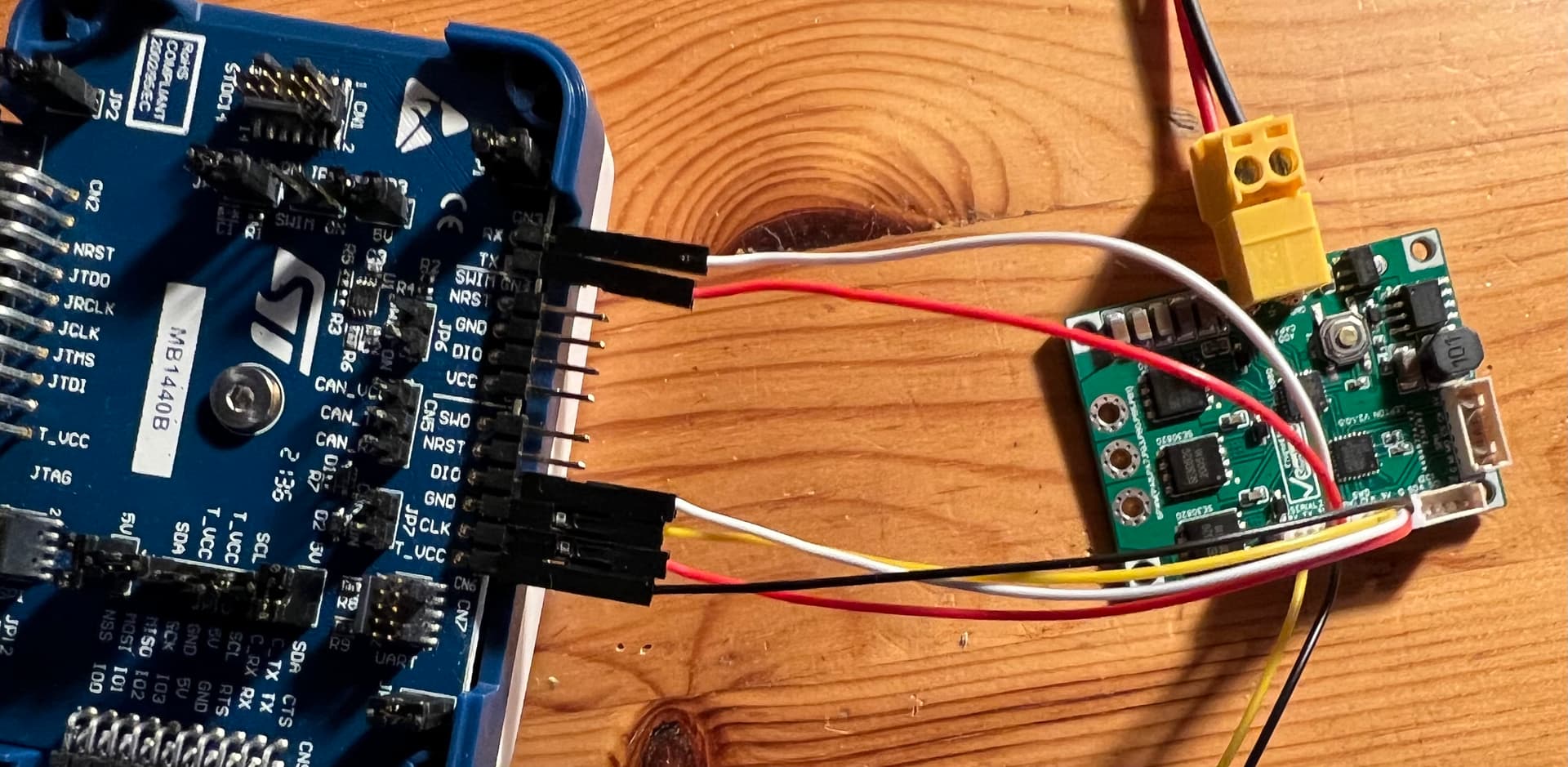
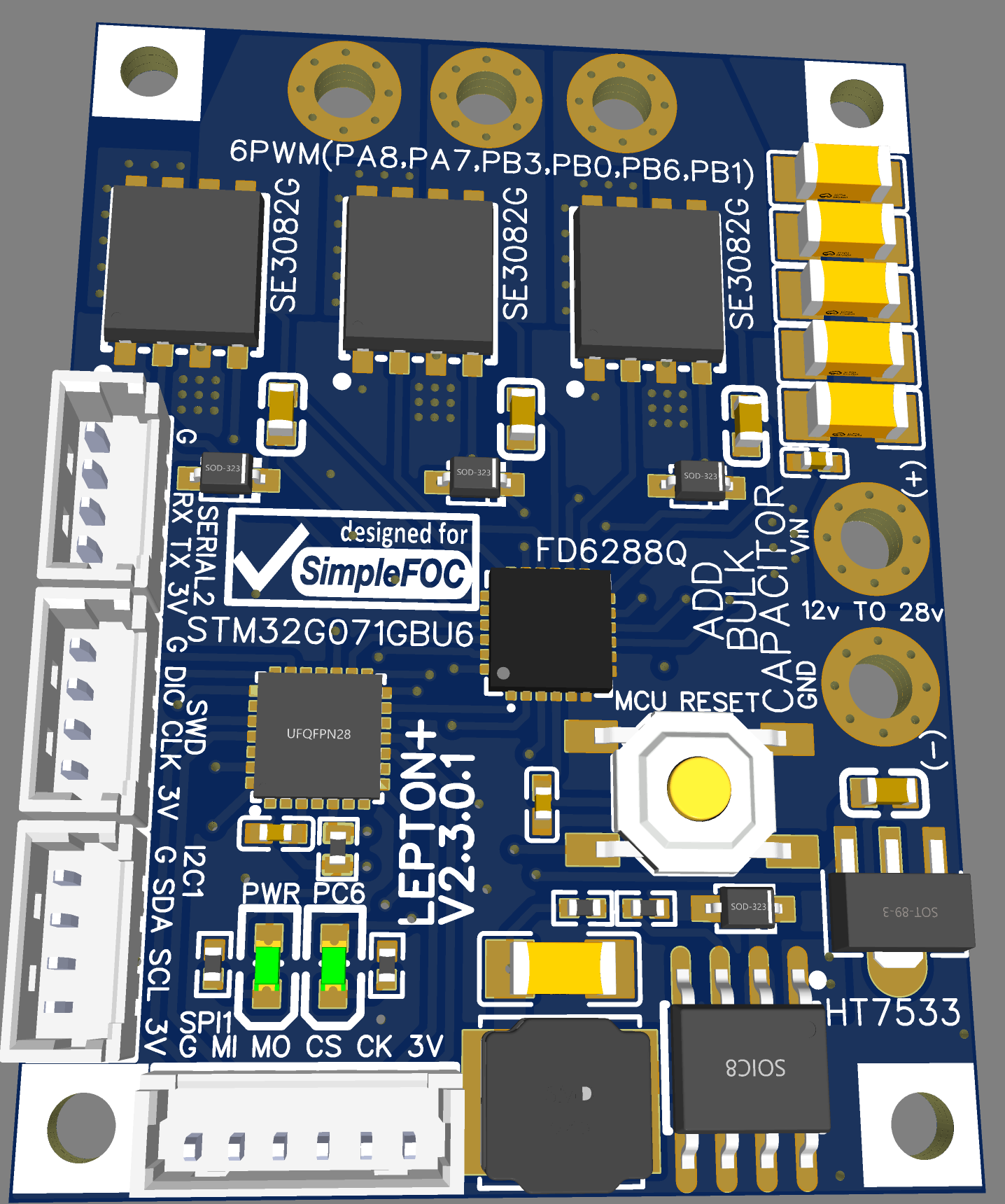
If we look at this forum, which I have browsed a lot, I do think the specs of the lepton with 2 layers and areas of copper you can flood with solder are in a very good place. We are usually talking about smaller motors and less than 50 volts. You definitely need a sensor with SimpleFOC so if it can be added to the back of the board that would make sense. Current sensing does not seem to be commonly used, but the real estate for the chips is cheap, as physical size does not seem to be a primary concern.
I think the cooling fan can be left for others to power, if you got a motor and need a fan you can do that part without difficulty. An adjustable buck regulator board can be wired to any fan easily. It’s the combo of mcu+sensor+power stage +possibly current sense that’s prone to wacky phenomena, needs to be compatible with a code base, and takes many iterations to squash bugs and refine.
Nancy, looking forward to checking out your board, perhaps a good approach is to post the general concept in detail? That way we don’t have to wait for the actual board. As previously mentioned I am not a big fan of the HAT approach, the MCU is going to be dedicated to the motor stuff anyway and the PCB assembly guys do a pretty bang up job with the integration. However it does simplify the design process because you can just roll with the mcu section and focus on other stuff. It’s too bad the community didn’t adopt the chip Valentine mentioned instead of the blue pill. There is a faster one called the black pill but it’s kind of expensive.