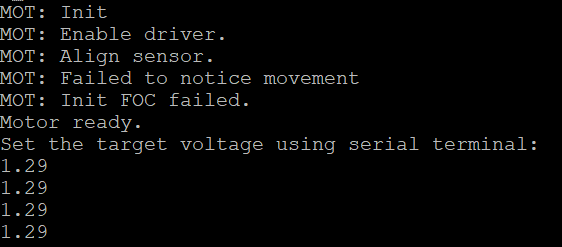
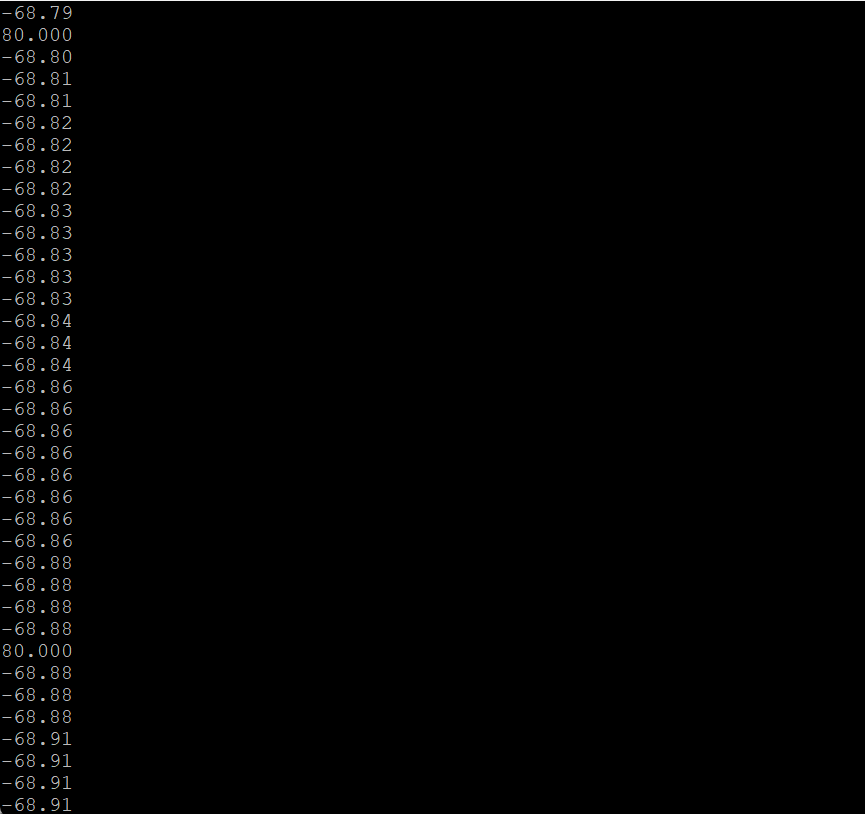
Hello, I am working with a STM32r405 based board and an AS5048 on Arduino IDE. I can get it to work in open loop and the sensor reads correctly, but in closed loop mode it still fails. I put a sensor.getAngle in the main loop and It shows the correct values, but it fails to calibrate and if I skip calibration with hard coded values it just jerks and stays still. I don’t know why the library seems like it cannot use the sensor values. please help.
Code:
{
/**
* Torque control example using voltage control loop.
*
* Most of the low-end BLDC driver boards doesn't have current measurement therefore SimpleFOC offers
* you a way to control motor torque by setting the voltage to the motor instead hte current.
*
* This makes the BLDC motor effectively a DC motor, and you can use it in a same way.
*/
#include <SimpleFOC.h>
#include <Arduino.h>
#include "SPI.h"
//#include <Wire.h>
#define HSE_VALUE 8000000
// from STM Cube-IDE, Clock config
//extern "C"
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
#define PIN_SERIAL1_RX PA3
#define PIN_SERIAL1_TX PA2
#define SERIAL_PORT_HARDWARE Serial2
HardwareSerial Serial2(PIN_SERIAL1_RX, PIN_SERIAL1_TX);
// MagneticSensorSPIConfig_s AS5047P_SPI = {
// .spi_mode = SPI_MODE1,
// .clock_speed = 500000,
// .bit_resolution = 14,
// .angle_register = 0x3FFF,
// .data_start_bit = 13,
// .command_rw_bit = 14,
// .command_parity_bit = 15
// };
// magnetic sensor instance - SPI
// MagneticSensorSPI sensor = MagneticSensorSPI(AS5147_SPI, 10);
// magnetic sensor instance - I2C
MagneticSensorSPI sensor = MagneticSensorSPI(AS5147_SPI, PA_0);
//MagneticSensorAS5048A sensor(8);
// magnetic sensor instance - analog output
// MagneticSensorAnalog sensor = MagneticSensorAnalog(A1, 14, 1020);
#define ENABLE_PIN PB12
// #define PWMA PC9
// #define PWMB PA8
// #define PWMC PB13
// #define PWMD PB14
// #define PWME PA9
// #define PWMF PB15
#define M0_INH_A PA8
#define M0_INH_B PA9
#define M0_INH_C PA10
#define M0_INL_A PB13
#define M0_INL_B PB14
#define M0_INL_C PB15
// BLDC motor & driver instance
// BLDCMotor motor = BLDCMotor(pole pair number);
BLDCMotor motor = BLDCMotor(7);
// BLDCDriver3PWM driver = BLDCDriver3PWM(pwmA, pwmB, pwmC, Enable(optional));
BLDCDriver6PWM driver = BLDCDriver6PWM(M0_INH_A, M0_INL_A, M0_INH_B, M0_INL_B, M0_INH_C, M0_INL_C, ENABLE_PIN);
// Stepper motor & driver instance
//StepperMotor motor = StepperMotor(50);
//StepperDriver4PWM driver = StepperDriver4PWM(9, 5, 10, 6, 8);
// voltage set point variable
float target_voltage = 0;
// instantiate the commander
Commander command = Commander(Serial2);
void doTarget(char* cmd) { command.scalar(&target_voltage, cmd); }
// void reciveHandle(int Howmany){
// target_voltage = map((float)Wire.read(), 0, 255, -12, 12);
// }
SPIClass SPI_2(PC12, PC11, PC10);
void setup() {
Serial2.begin(115200);
//pinMode(PA0, OUTPUT);
// SPI.setMISO(PC11);
// SPI.setMOSI(PC12);
// SPI.setSCLK(PC10);
// enable more verbose output for debugging
// comment out if not needed
//SimpleFOCDebug::enable(&Serial2);
// initialise magnetic sensor hardware
//sensor.spi_mode = SPI_MODE1; // spi mode - OPTIONAL
//sensor.clock_speed = 1000000; // spi clock frequency - OPTIONAL
sensor.init(&SPI_2);
// link the motor to the sensor
motor.linkSensor(&sensor);
// power supply voltage
driver.pwm_frequency = 40000;
driver.voltage_power_supply = 12;
driver.voltage_limit = 12;
driver.init();
motor.linkDriver(&driver);
//motor.phase_resistance = 1.5;
// motor KV rating [rpm/V]
//motor.KV_rating = 920; // rpm/volt - default not set 920kv ready to sky
// aligning voltage
motor.voltage_sensor_align = 0.5;
// choose FOC modulation (optional)
//motor.foc_modulation = FOCModulationType::SpaceVectorPWM;
// set motion control loop to be used
motor.controller = MotionControlType::torque;
// comment out if not needed
motor.useMonitoring(Serial2);
//motor.zero_electric_angle = 1.466;
//motor.sensor_direction = Direction::CW; // CW or CCW
motor.voltage_limit = 0.5;
// initialize motor
motor.init();
// align sensor and start FOC
motor.initFOC();
// add target command T
command.add('T', doTarget, "target voltage");
Serial2.println(F("Motor ready."));
Serial2.println(F("Set the target voltage using serial terminal:"));
_delay(100);
}
//int pulseWidth = 0;
//int loopCount = 0;
//int v1 = 0;
//int startTime;
//int endTime;
void loop() {
//startTime = millis();
// main FOC algorithm function
// the faster you run this function the better
// Arduino UNO loop ~1kHz
// Bluepill loop ~10kHz
motor.loopFOC();
Serial2.println(sensor.getAngle());
// Motion control function
// velocity, position or voltage (defined in motor.controller)
// this function can be run at much lower frequency than loopFOC() function
// You can also use motor.move() and set the motor.target in the code
//motor.move(target_voltage);
// if (loopCount > 25) {
// pulseWidth = pulseIn(2, HIGH, 20000);
// //Serial.println(pulseWidth);
// if(pulseWidth < 500) {
// v1 = 0;
// }
// else {
// v1 = map(pulseWidth, 500, 2000, -12, 12);
// }
// //Serial.println(pulseWidth);
// motor.move(v1);
// loopCount = 0;
// }
// user communication
motor.move(target_voltage);
command.run();
//loopCount++;
//endTime = millis();
//Serial.println(startTime-endTime);
}
}