- Install sucessfully (Ubuntu)
- Start motion application (source below)
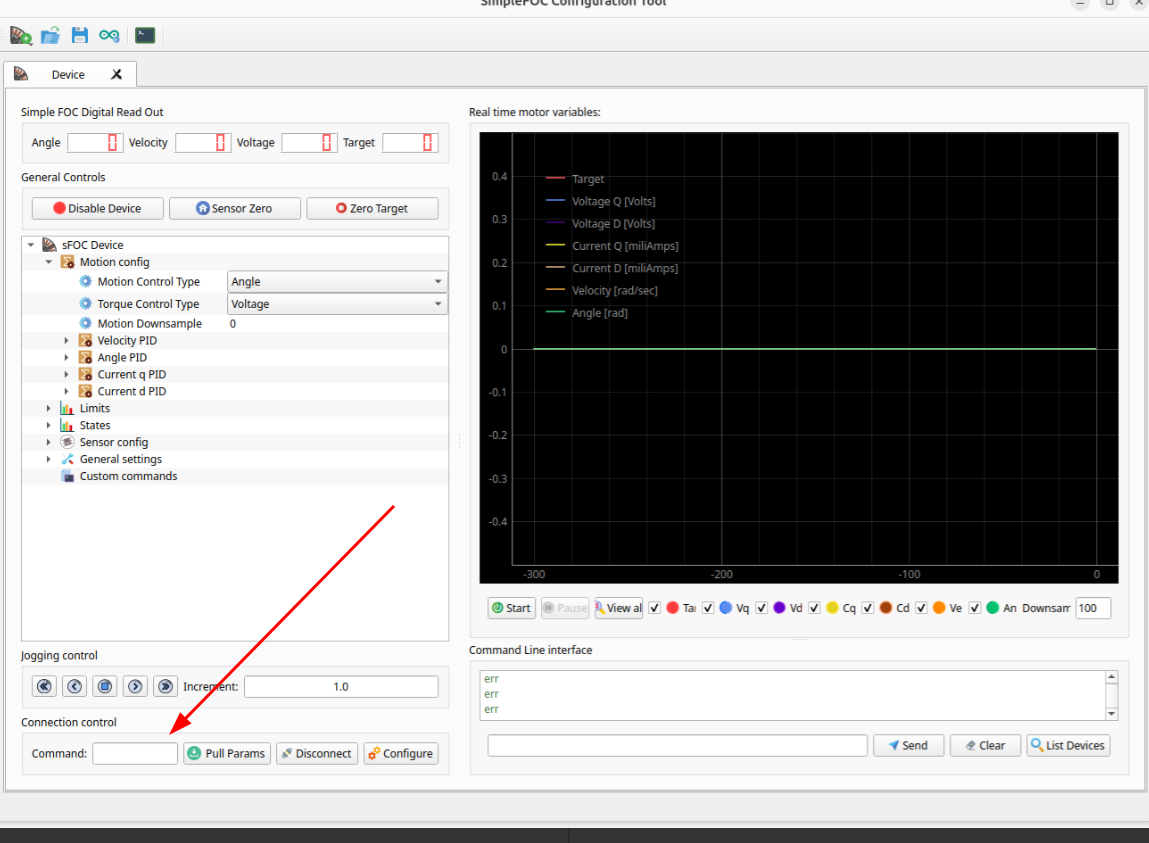
- Click “Configure”, enter bitrate, enter “M” for command
- Click “Connect”, successful.
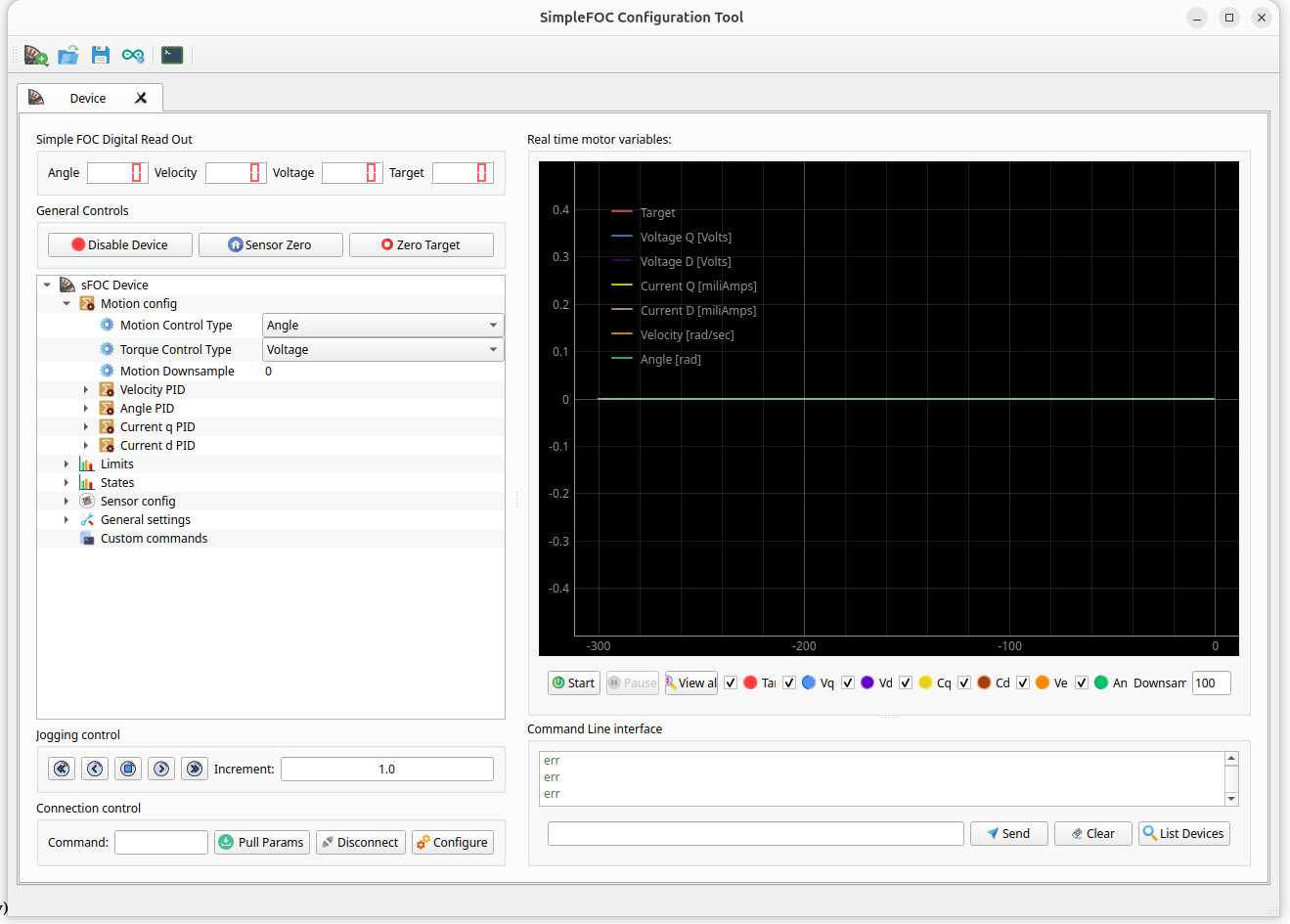
- Absolutely nothing. All fields are “0”. I tried “Pull Parmas”, “Enable”. Nothing does anything. No error messages to let me know what’s wrong.
Screenshot is below.
#include <Arduino.h>
#include <SimpleFOC.h>
#include “STM32HWEncoder.h”
#include <SimpleFOC.h>
#include “DRV8301.h”
#include “Wire.h”
#include “AS5600.h”
#include “core_cm4.h”
// ODESCV4_3 : F405+DRV8301
#define MOT1_AH PA8
#define MOT1_BH PA9
#define MOT1_CH PA10
#define MOT1_AL PB13
#define MOT1_BL PB14
#define MOT1_CL PB15
#define MOT1_EN PB12
#define MOT1_FAULT PD2
#define MOT1_SO1 PC0
#define MOT1_SO2 PC1
#define MOT1_SO3 \_NC
#define MOT2_AH PC6
#define MOT2_BH PC7
#define MOT2_CH PC8
#define MOT2_AL PA7
#define MOT2_BL PB0
#define MOT2_CL PB1
#define MOT2_EN PB6
#define ENC1_A PB_4
#define ENC1_B PB_5
#define ENC1_Z PC_9
#define ENC2_A PB_6
#define ENC2_B PB_7
#define ENC2_Z PC_15
#define SPI_SCK PC10
#define SPI_MISO PC11
#define SPI_MOSI PC12
#define SPI_CS PC13
#define UART_RX PA0
#define UART_TX PA1
// motions parameters
#define CONTROL_TYPE (MotionControlType::velocity)
#define SUPPLY_V (12)
#define DRIVER_V_LIMIT (12)
#define MOTOR_V_LIMIT (2)
#define MOTOR_I_LIMIT (100.0)
#define MOTOR_VEL_LIMIT (333.0)
#define SENSOR_ALIGN_V (0.5)
#define MOTOR_PP (7)
#define MOTOR_RES (0.1)
#define MOTOR_K (2000)
#define MOTOR_IND (0.000010)
#define VEL_P (0.1)
#define VEL_I (0.5)
#define VEL_D (0.0)
#define VEL_R (0.0)
#define VEL_L (1000.0)
#define VEL_F (0.01)
#define ANG_P (200.0)
#define ANG_I (0.0)
#define ANG_D (0.0)
#define ANG_R (0.0)
#define ANG_L (133.0)
#define ANG_F (0.00)
STM32HWEncoder sensor = STM32HWEncoder(1024, ENC1_A, ENC1_B);
DRV8301 gate_driver = DRV8301(SPI_MOSI, SPI_MISO, SPI_SCK, SPI_CS, MOT1_EN, MOT1_FAULT); // MOSI, MISO, SCLK, CS, EN_GATE, FAULT
BLDCMotor motor = BLDCMotor(MOTOR_PP, MOTOR_RES, MOTOR_K, MOTOR_IND); // uni motor
BLDCDriver3PWM driver = BLDCDriver3PWM(MOT1_AH, MOT1_BH, MOT1_CH, MOT1_EN); // disco-STM32G431CB
// commander communication instance
Commander command = Commander(Serial);
void doTarget(char\* cmd) {command.scalar(&motor.target, cmd);}
void doLimit(char\* cmd) {command.scalar(&motor.voltage_limit, cmd);}
void doMotor(char\* cmd) { command.motor(&motor, cmd); }
void doInduct(char\* cmd) { command.scalar(&motor.phase_inductance, cmd); }
char msgbuf\[256\];
void setup() {
Serial.begin(921600); // WARNING: low value like 115200 cause distorted FOC
// for timer analysis
SimpleFOCDebug::enable(&Serial);
Serial.printf(“enter setup…\\n”);
sensor.init();
// driver config
// power supply voltage \[V\]
driver.voltage_power_supply = SUPPLY_V;
driver.voltage_limit = DRIVER_V_LIMIT;
driver.pwm_frequency = 25000;
driver.init();
// configure the DRV8301
gate_driver.begin(PWM_INPUT_MODE_3PWM, SHUNT_GAIN_10);
\_delay(100);
int reg1, reg2, reg3, reg4, fault;
gate_driver.get_regs(®1, ®2, ®3, ®4);
fault = gate_driver.is_fault();
sprintf(msgbuf, “DRV8301: fault=%x, STATREG1=0x%.4x, STATREG2=0x%.4x, CTRLREG1=0x%.4x, CTRLREG2=0x%.4x”, fault, reg1, reg2, reg3, reg4);
Serial.println(msgbuf);
// link driver
motor.linkDriver(&driver);
// link current sense and the driver
// motor.motion_downsample = 10;
// set the inital target value
motor.target = 0;
motor.useMonitoring(Serial);
motor.monitor_downsample = 0; // disable intially
motor.monitor_variables = \_MON_TARGET | \_MON_VOLT_Q | \_MON_VOLT_D | \_MON_CURR_Q | \_MON_CURR_D | \_MON_VEL | \_MON_ANGLE; // monitor target velocity and angle
// initialise motor
// moduleation mode
motor.init();
// limts: MUST BE AFTER motor.init() to take effect
motor.voltage_sensor_align = SENSOR_ALIGN_V;
//motor.controller = MotionControlType::torque;
motor.controller = CONTROL_TYPE;
// default voltage_power_supply
motor.velocity_limit = MOTOR_VEL_LIMIT;
motor.voltage_limit = MOTOR_V_LIMIT;
motor.current_limit = MOTOR_I_LIMIT;
// Tune PID MUST BE AFTER motor.init() to take effect
motor.PID_velocity.P = VEL_P; motor.PID_velocity.I = VEL_I; motor.PID_velocity.D = VEL_D; motor.PID_velocity.output_ramp = VEL_R; motor.PID_velocity.limit = VEL_L; motor.LPF_velocity.Tf = VEL_F;
motor.P_angle.P = ANG_P; motor.P_angle.I = ANG_I; motor.P_angle.D = ANG_D; motor.P_angle.output_ramp = ANG_R; motor.P_angle.limit = ANG_L; motor.LPF_angle.Tf = ANG_F;
motor.initFOC();
// subscribe motor to the commander
command.add(‘L’, doLimit, “voltage limit”);
command.add(‘M’,doMotor,“motor”);
command.verbose = VerboseMode::on_request;
Serial.printf(“setup complete…\\n”);
\_delay(1000);
}
void loop()
{
// iterative setting FOC phase voltage
motor.loopFOC();
// iterative function setting the outter loop target
motor.move();
// motor monitoring
motor.monitor();
// user communication
command.run();
}