Because I wanted to know how fast the sine wave calculation of SimpleFOC is on an Arduino-Nano, I wrote a test sketch:
/*
* Test the SimpleFoc sine wave function for accuracy and speed
*
* 2024-06-29 ChrisMicro
*
* https://github.com/simplefoc/Arduino-FOC/blob/master/src/common/foc_utils.cpp
*
*
*/
#define _2PI 6.28318530718f
#define _PI_2 1.57079632679f
// function approximating the sine calculation by using fixed size array
// uses a 65 element lookup table and interpolation
// thanks to @dekutree for his work on optimizing this
__attribute__((weak)) float _sin(float a){
// 16bit integer array for sine lookup. interpolation is used for better precision
// 16 bit precision on sine value, 8 bit fractional value for interpolation, 6bit LUT size
// resulting precision compared to stdlib sine is 0.00006480 (RMS difference in range -PI,PI for 3217 steps)
static uint16_t sine_array[65] = {0,804,1608,2411,3212,4011,4808,5602,6393,7180,7962,8740,9512,10279,11039,11793,12540,13279,14010,14733,15447,16151,16846,17531,18205,18868,19520,20160,20788,21403,22006,22595,23170,23732,24279,24812,25330,25833,26320,26791,27246,27684,28106,28511,28899,29269,29622,29957,30274,30572,30853,31114,31357,31581,31786,31972,32138,32286,32413,32522,32610,32679,32729,32758,32768};
unsigned int i = (unsigned int)(a * (64*4*256.0f/_2PI));
int t1, t2, frac = i & 0xff;
i = (i >> 8) & 0xff;
if (i < 64) {
t1 = sine_array[i]; t2 = sine_array[i+1];
}
else if(i < 128) {
t1 = sine_array[128 - i]; t2 = sine_array[127 - i];
}
else if(i < 192) {
t1 = -sine_array[-128 + i]; t2 = -sine_array[-127 + i];
}
else {
t1 = -sine_array[256 - i]; t2 = -sine_array[255 - i];
}
return (1.0f/32768.0f) * (t1 + (((t2 - t1) * frac) >> 8));
}
// function approximating cosine calculation by using fixed size array
// ~55us (float array)
// ~56us (int array)
// precision +-0.005
// it has to receive an angle in between 0 and 2PI
__attribute__((weak)) float _cos(float a){
float a_sin = a + _PI_2;
a_sin = a_sin > _2PI ? a_sin - _2PI : a_sin;
return _sin(a_sin);
}
void setup()
{
Serial.begin(115200);
}
float angle = 0;
#define BUFLEN 100
float buffer[BUFLEN];
void loop()
{
const float dphi=2 * PI / 360/3;
uint32_t start=micros();
for (int n = 0; n < BUFLEN; n++)
{
buffer[n] = _sin(angle);
//buffer[n] = sin(angle);
angle += dphi;
}
uint32_t dt=micros()-start;
for (int n = 0; n < BUFLEN; n++)
{
Serial.println(buffer[n]*1000);
delay(5);
}
/*
Serial.print("t [us]: ");
Serial.println(dt/BUFLEN);
delay(1000);
Serial.println("*******************");
*/
}
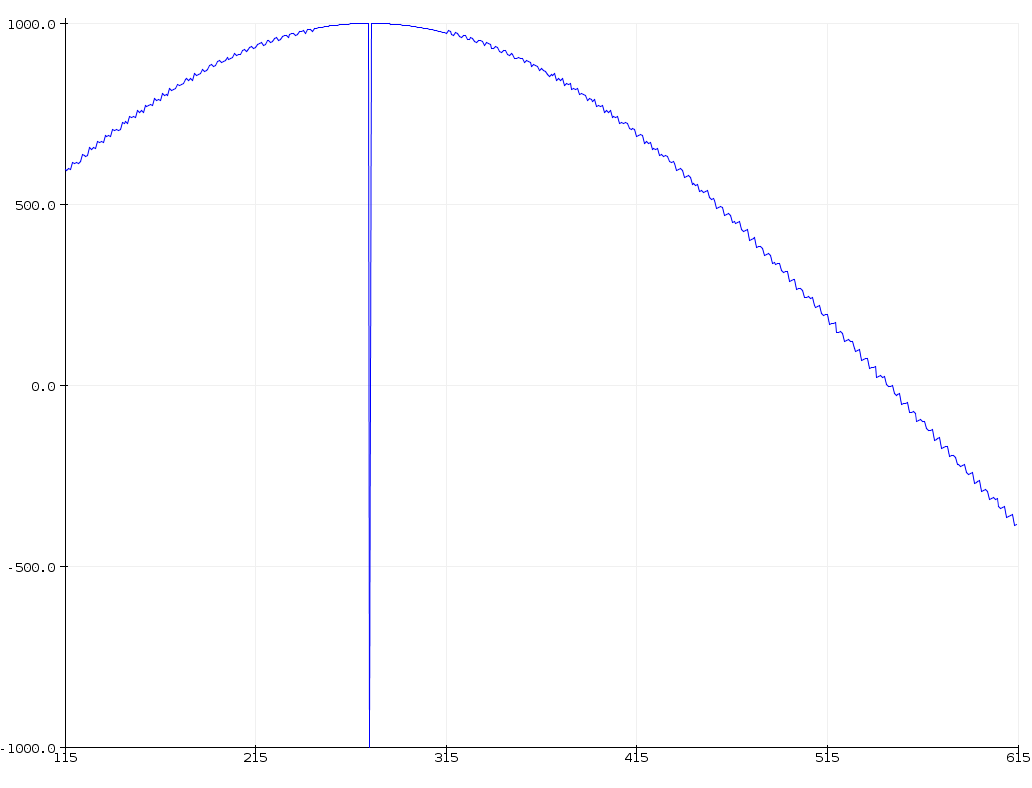
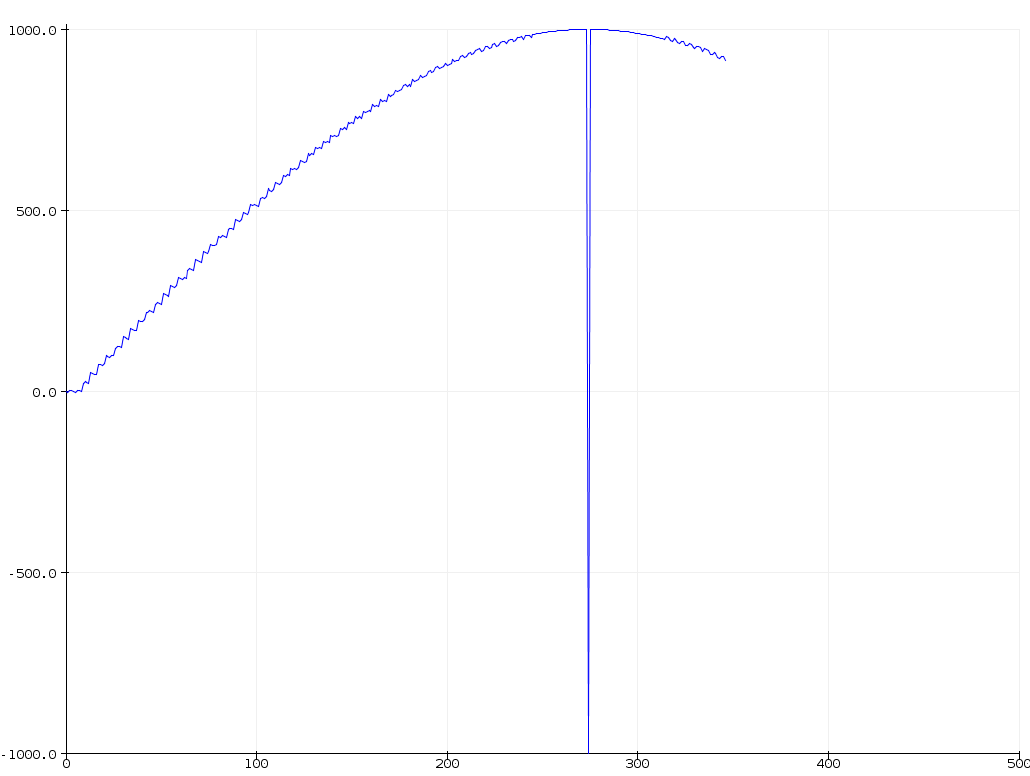
Can it be, that is has interpolation problems?: