Hi!
I mean gimbal motor. It’s just that the translator translated it a little incorrectly, but I didn’t notice it.
I am using this one (around 10$ on ali)

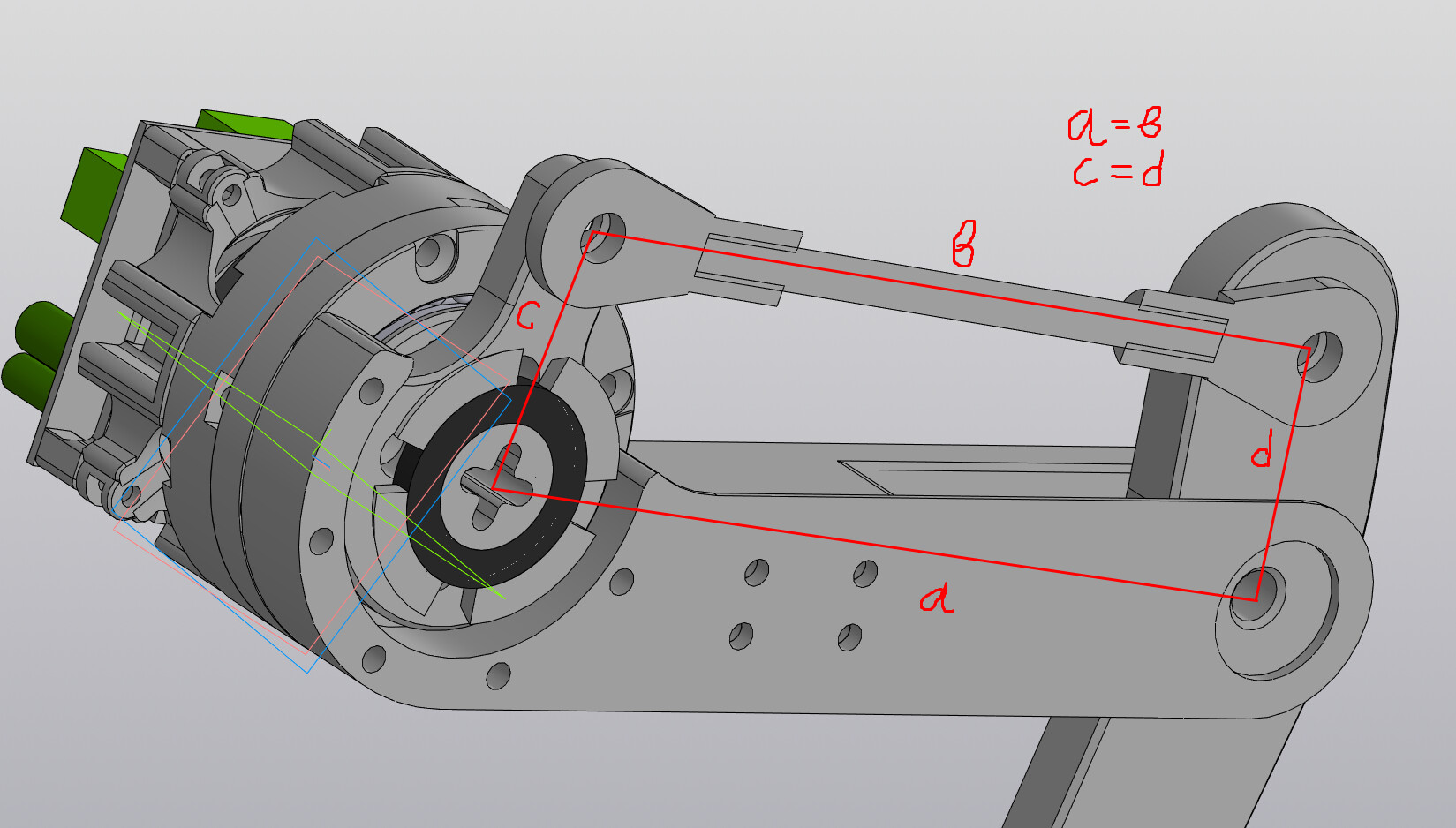
If I understand correctly what you are asking, then we just need to make a parallelogram, then the angle of rotation of the actuator will coincide with the angle of rotation of the ankle.
To be honest, I don’t quite understand what sinusoidal behavior we are talking about, but there were no problems with the torque (well, only maybe a low torque of 2 Nm)