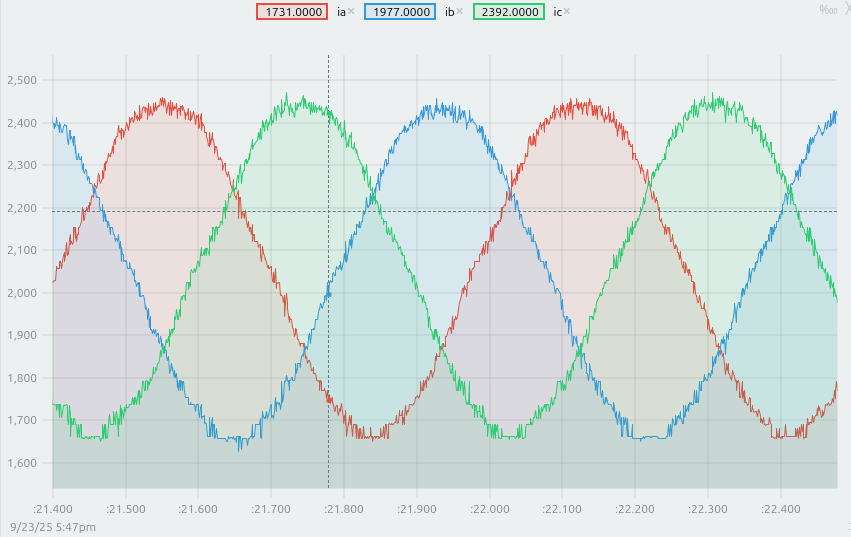
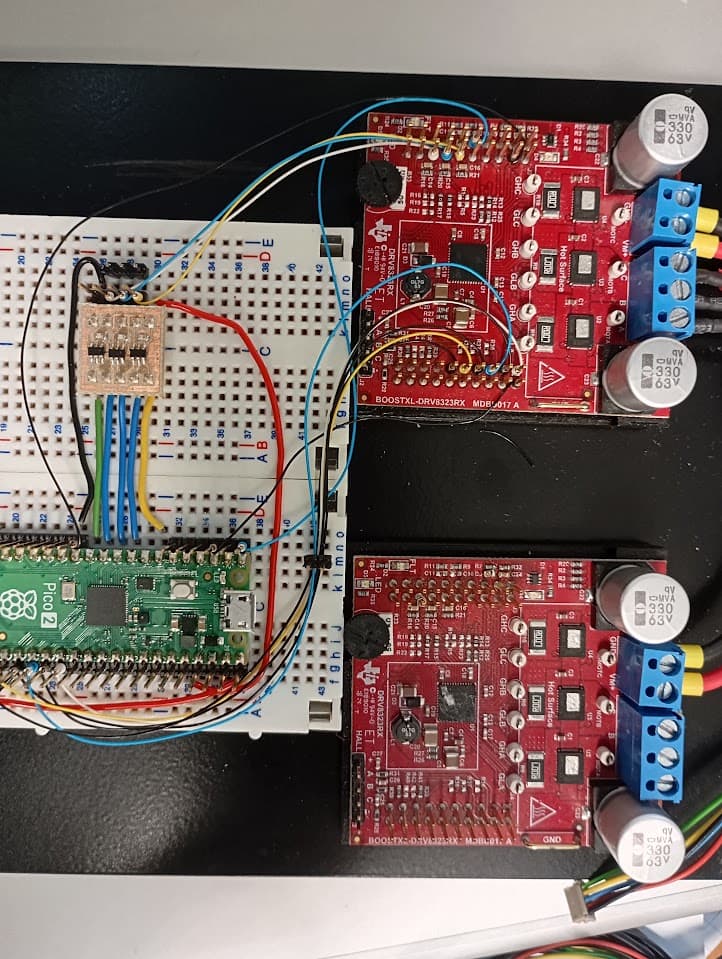
Hi, I think the current reading PR is in an acceptable stage for a first review, and I’m happy to send a proto board with the 3 ADC if someone (preferably in France) is interested in testing it.
My plan is to first fix some ringing issue with the boostxl by tuning gate driving parameters, and then switch to close loop current control.
I also want to think about multiple axis setup with more ADC in parallel, and how the library should handle it. The RP2350 should have no issue driving 2 or (3,4?) motors, making it quite nice for some applications.
I’m considering using more state machine with the same PIO program if we want to interleave the PWMs (but at the cost of 1clk and 1cs lines per additional motors), or keep them all in sync and save few pins.
I’ll try to benchmark more and report here for multi axis.
I am trying to implement the MXLEMMINGObserverSensor.
I have modified my hardware design. Now I am using 2 x current Linear Hall-effect current sensor (MCS1802 w/isolated voltage output), ADC3 for phase U (first phase), and ADC2 for phase W (third phase).
I have also a setup where I use 6 PWM signals UH/UL , VH/VL and WH/WL.