Sorry - this request is not directly related to SimpleFOC, but I am hoping to leverage the enormous brains of this community to help me out with my searches for a motor for a project.
I am wondering if anyone has a recommendation of where to purchase/source a PMSM machine that:
is able to develop 30 Nm torque (continuous),
operating at a constant speed of about 2500 RPM (FOC controlled)
run off 48 V, and
be dual shaft (I need to mount an encoder on one end, Hall sensors won’t cut it)
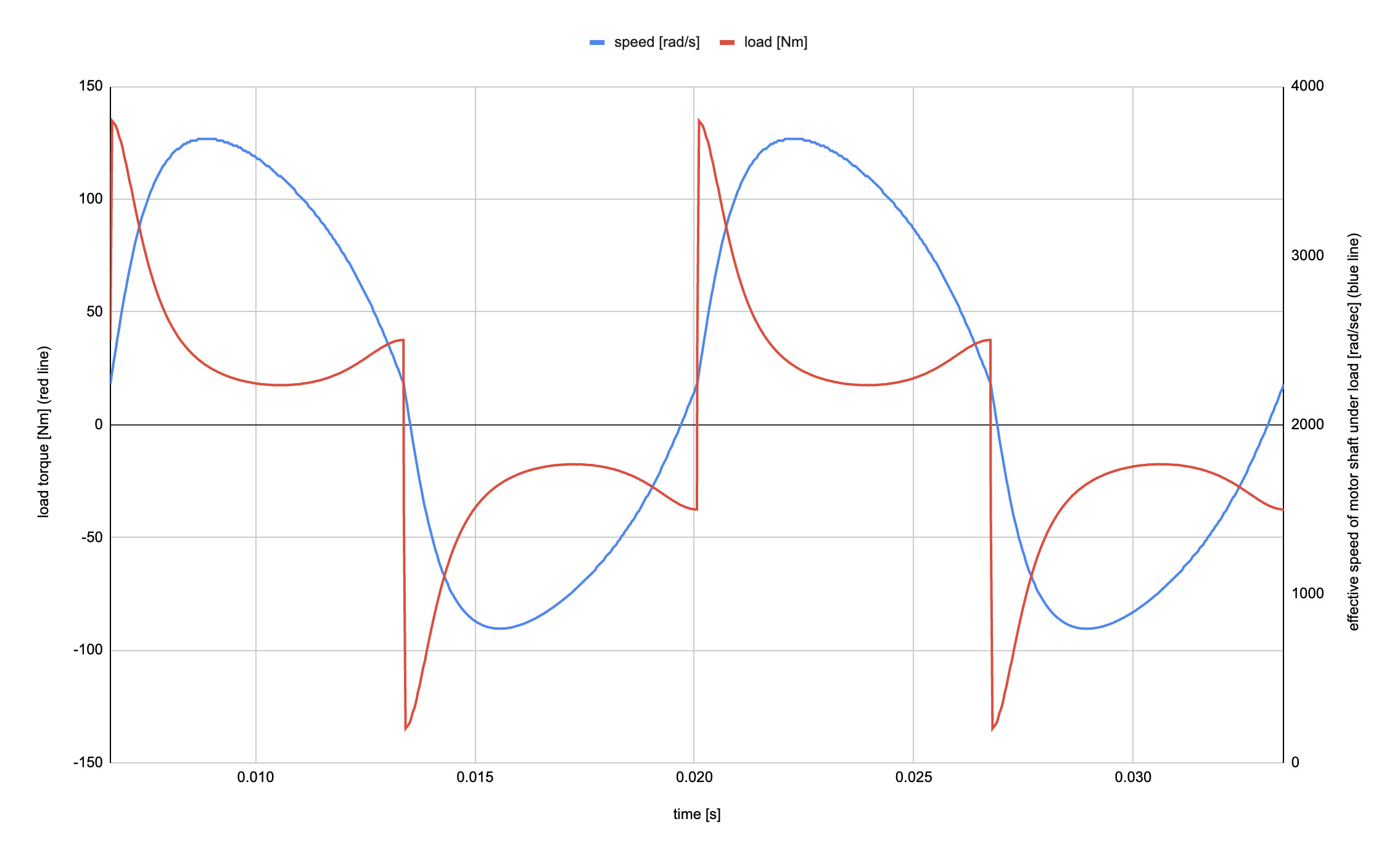
The load profile, and effective speed (under load) of motor shaft during one rotation is attached here.
Looking forward to your thoughts, and suggestions.
Thanks @JorgeMaker! Yeah, I have tried google too My searches always come up with motors that kinda fit…but don’t. For example in the above, it’s not clear at all what the encoder (if any) is present. And, looks like the operating voltage is > 400V. Maybe I am misreading something?
Just multiply the rated current and you get 210 A. Enough power to start a large diesel engine ??
You should turn to some industrial supplier. I don’t think anybody on this forum can help you.
Do you mean just push 210A into the phases? Surely that will quickly melt the wiring? The wire gauge probably is appropriate for their recommended current of 21A, no?
To your second point, I’m super impressed with this forum and wonderful community, so it was definitely worth asking
You want a miracle. A 48V motor would have heavier wire than a 480V one. So it would be able to handle that current, but the torque per Amp would also be 10 times less. At 0.05 Nm/A you would need 600 Amps to meet your needs. To handle such high currents you need hardware that probably nobody on this forum has knowledge of.
P = T * w = 30 * 262 = 7.9 kW
I = 7.9k / 48 = 164 A
and then, we get:
(torque per amp) Kt = 30 / 164 = 0.18 [Nm/A]
Kv = 1/Kt = 5.5 [rad/s per V]
or in more common units:
Kv = 52 [RPM/V] (which we also get from: 2500 RPM / 48 V = 52).
Is there an error in my calculations? These numbers aren’t crazy high/low (except the current - the current is pretty beefy but not miracle worthy ) - unless I’ve made a mistake somewhere, which is totally possible.
I suspect that I haven’t found anything in my searches yet because there isn’t a wide application for a motor with these specs. As you say, I do need to approach some industrial suppliers, and I’ll get to that soon.
Is there a particular reason you’re thinking on direct driving your application? I think you could really benefit from a quasi-direct drive system, if you see benefits on direct driving.
@ngalin To lower the amps you need to go into pretty serious high voltage stuff. Like straight rectified 3 phase 400v mains power. I’m currently working on a simplefoc driver with esp32 and a IGBT module that would support 400v 30a max. But I’m only in the prototyping stage.
@David_Gonzalez - thanks! Yup, those motors look pretty good, especially that “medium powered” version. Very little info about the motor specs on the site, but I’ll do some more digging and may find out more.
Thanks for the YouTube link - the guy is super entertaining to watch!
I didn’t know about ‘quasi-direct drive systems’ - found this paper which describes the application and will definitely dive in and learn more about it. Really helpful - thanks! If you have more info to share about quasi-direct drive systems, please send them my way. Have you used them?
Thanks @Franz_Schmidt - I don’t I want to lower the amperage at this stage, weight isn’t a problem, getting access to rectified 3 phase 400V mains power is. What kind of lab are you working from?
Also, in my project the motor will need to flip-flop from generating to regen twice within a single revolution - see the speed/torque curves in the first post…Hence, what I really need is a battery.
The reason I asked about your application is that you can get almost the same benefits from quasi-direct-driving a system instead of direct driving it, and make the overall solution cheaper and more convenient (less power needed).
Some modern vehicles use brushless motors as starter/alternators, I wonder if one of those could be shimmied into the role. From a larger vehicle perhaps. Just an idea. No idea what your budget is, but it’s a motor of a size I think you could get relatively cheaply used/off a scrapped vehicle.
Alibaba does work in my experience, it takes a lot of back and forth and finagling and you have to shop a lot and be very careful to confirm exactly what you are getting but I have always gotten good stuff in the end, and the variety you have to choose from is not something you can find anywhere else. Also they always ship by courier which will cost a few hundred dollars for a heavy large item like this.