Yeah, it’s diminishing returns to add gears. But it does affect print speed. That’s why a lot of printers use what I think is called the corexy configuration, it reduces the moving mass of the head. However with linear advance it’s not as big a deal, because linear advance compensates for the velocity variations, mostly eliminating the defects that otherwise arise.
I do think 2 pinion gears is a good idea, it could double the force on the filament which means higher extrusion rate esp with smaller nozzles.
But it’s all about cost to performance ratio, I just think it’s sad how some people are trying to 3d print titanium structures for their extruders to reduce the weight, then use a big stepper motor because they don’t understand this. Whatever, lots of that going around I’m afraid. Bowden tubes actually work surprisingly well in my experience, if they are nice and narrow and you use the retraction settings just so. Then you don’t have any gears to wear out. Also the little pinions actually do wear out to my surprise so it’s important to use standard ones.
I still like the idea of air cooling. whatever else you do that would be useful and probably let you chop the size of the stepper and up the current. But then you need a little compressor for $100 or whatever. If you can get one that cheap even.
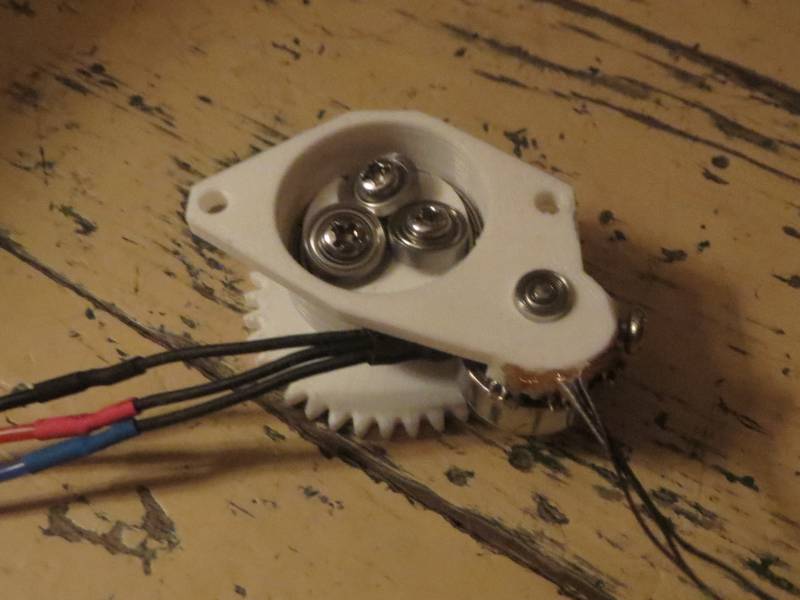
Well the harmonic turned out to be overly complicated, but then I had the idea to put the motor off to the side and use regular gears, with the extruder part supported by a single 17x23x4mm bearing (which is just press fit into the housing since retraction shouldn’t pull down hard enough to dislodge it). The small bearings in the center are so you can stick a reverse bowden tube into it and it will passively rotate around it.
Built it and seems viable, though the motor is probably undersized. If the base was made of aluminum it might be ok since it would act as a heatsink, but in PLA it gets too hot above 0.5A (which should be around 5kg extrusion force). This is a 1404 stator, and 1408 should fit without changing the overall dimensions, though it would tip the weight over 30 grams
I can’t actually get the motor to run closed loop… I think the cogging torque is too strong to cheat it with sinePWM and manually tuned zero angle, and I didn’t give myself enough space to get the stator rotated correctly for trapezoid mode. But I think I’ll call it done and get back to more productive work.
That looks huge on the pics, but it is small on the scale
The initial idea was to build an extruder with hollow shaft, so everything would have a small enough footprint to fit on a delta-printers effector. A planetary gearbox would be problematic with a hollow sun-gear.
Your pinion gear will slip or melt soon if you can’t make it run in closed loop. Maybe it only takes a bit higher align_voltage to overcome the cogging?