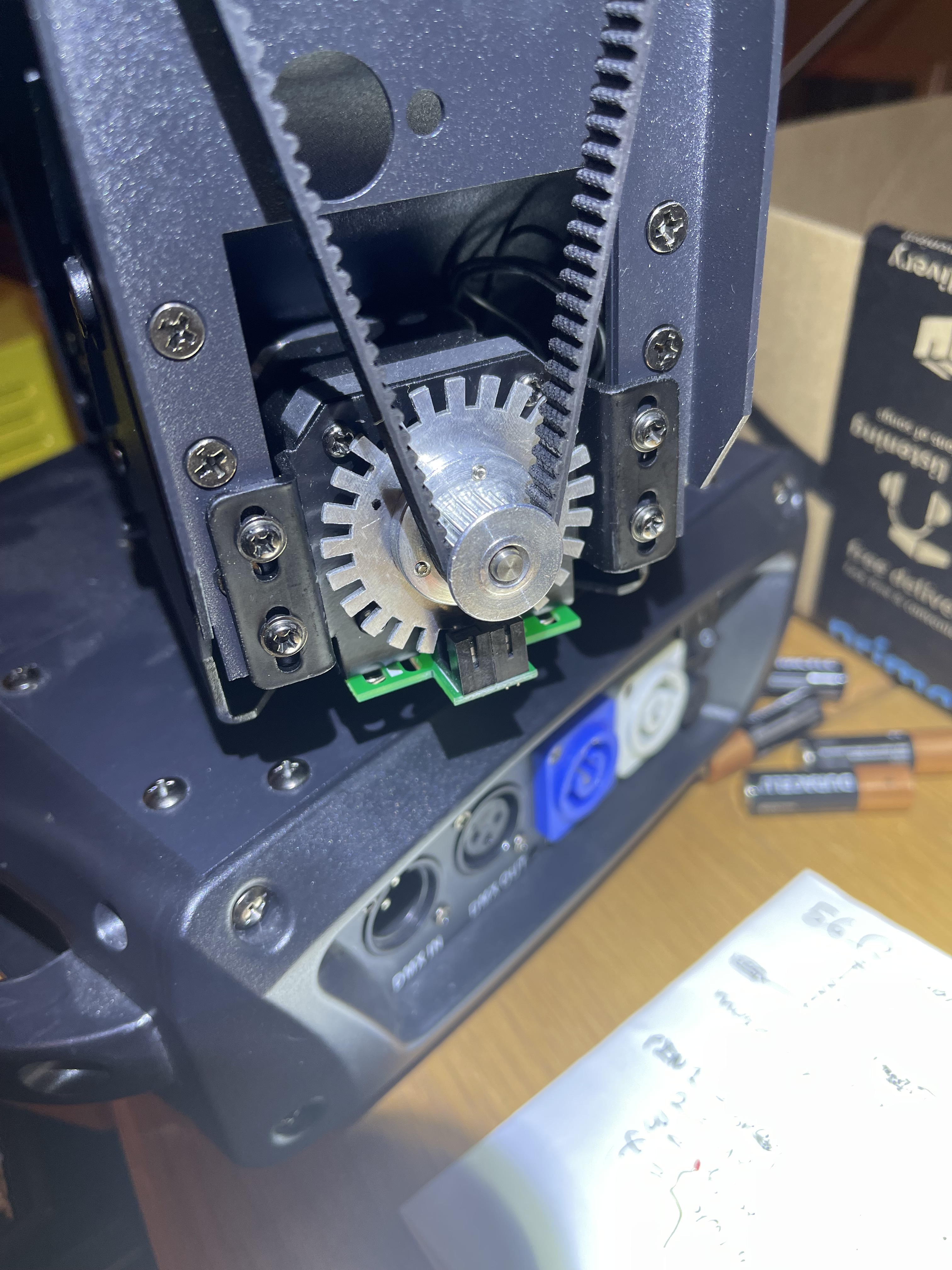
I’m currently trying to drive an unbranded unmarked bipolar stepper motor equipped with a pair of photointerrupters and a 24-flag wheel for an encoder. I’m using an l298n driver and a Pi Pico. The encoder works just fine in the encoder test sketch— I bug hunted the hell out of the missed pulses and now that’s fixed. Even so, I’m only able to run the motor in velocity-open loop mode, and only at a speed of between 1.5-2 rad/sec. Any lower or higher and it fails to start turning and grinds back and forth.
When I try to run it in angle-open loop mode, the motor locks in place but makes the classic “stepper motor hum” for about how long you’d expect it to move for. There is no motion or noise in any of the closed-loop modes— it just stays locked in place.
Unfortunately, I have seen discussions online about how simplefoc doesn’t play well with low cpr encoders. I don’t really have the option of adding a higher-resolution encoder to this project. I am trying to hack an existing chinesium moving stage light and interface with the existing electromechanical assembly. If the encoder is indeed the problem, is there anything I can do to cheat by like the OEM somehow did?
(On my phone, will add code shortly)