That sensor calibration is super helpful. I tried it out, and… it spat out a table of NaNs, but it did at least do a full CW and CCW slow rotation to generate the NaNs ![]() I’ll dig deeper after I try a better jig.
I’ll dig deeper after I try a better jig.
Better jig comparison:
Before (magnet mounted to the rotor directly):
After (magnet mounted to the shaft protruding from the stator):

The magnet is from Digikey, not aliexpress (and not an aliexpress digikey reseller either), so it’s probably OK (it looks like the deadpool logo on a magnetic viewer).
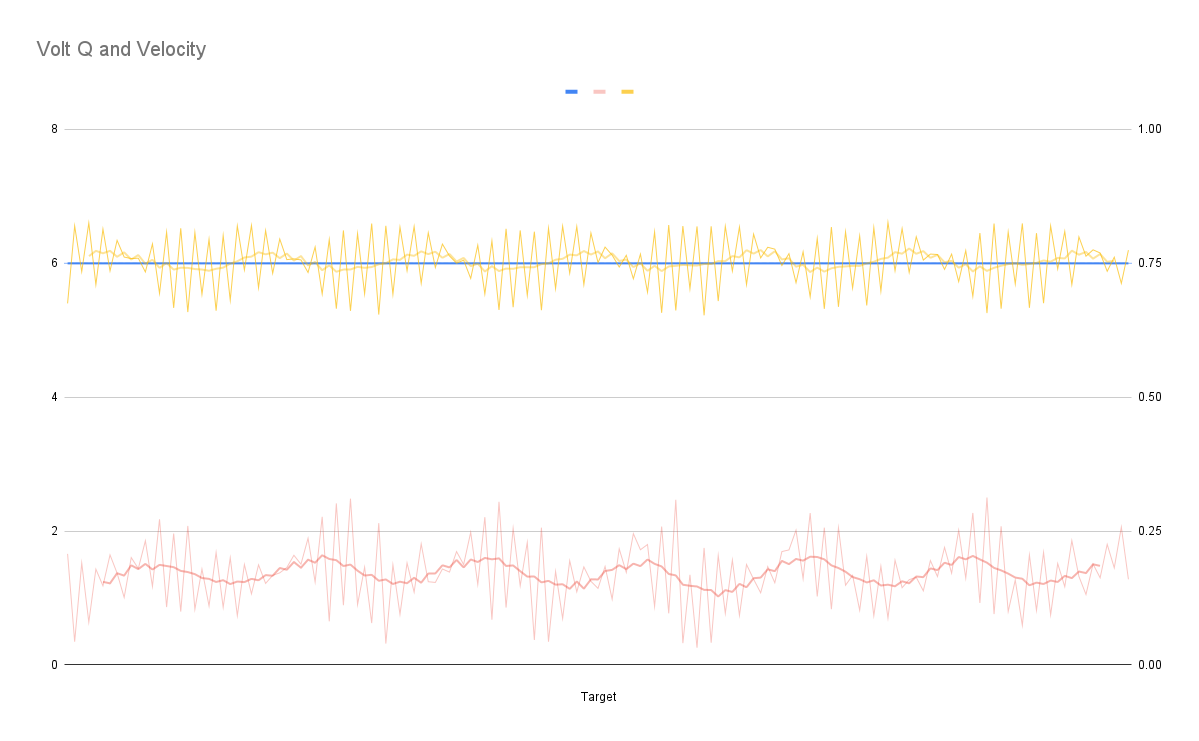
The two graphs show the same time period, with the same settings, just a different mount (and I swapped CW for CCW since that changed).
I think the dramatic reduction in noise is a result of the motor itself not interfering so much with the sensor, but the increase in that clean periodic error appears to be caused by the shaft (2mm, fairly long) wobbling more than I’d like. It could also be that the Mosquito and/or angle sensor are off-center.
The eccentricity calibration is still not working, but I’ll follow up in it’s thread. (Lots of NaN,s and Overflowing floats).