Hello, I am getting into motor control systems and would like to dip my toes into FOC. I plan on making a motor control board with the SAMD21 and some discrete FETS, but before that, I would like to do a simple, low-risk test with the L6234. I hoped to buy the breakout board listed on the SimpleFOC docs, but it is not available for me, perhaps because I am in the US. So I would like to make the PCB myself, but the datasheet and what I can see from pictures of the L6234 breakout board seem to differ. Does anyone have a schematic for the L6234 breakout board, or any tips on how to set up the L6234 for SimpleFOC?
For me it shows as “In Stock” and seems orderable to the US (EUR10 shipping).
Is it failing on the PayPal step? Please use the shop contact form if there are troubles ordering, but you would like to order.
If you’d like to make your own, then the Gerber files and Design files are here:
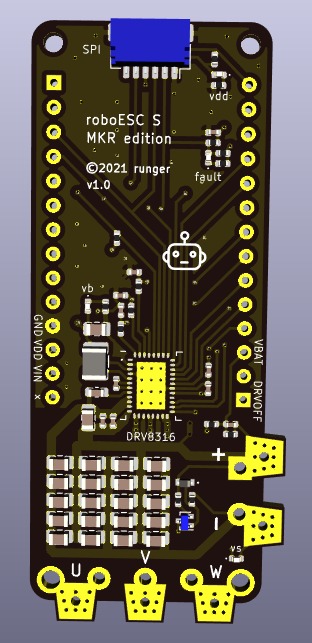
If you’d be interested in a SAMD21-compatible shield, I have made one that I am still in the process of testing, based on the new DRV8316 driver chip, KiCad files and gerbers are here:
It fits on top of / underneath an Arduino MKR type board like the MKR WiFi 1010 or MKR1000. The MKRs use SAMD21 MCUs.
You’re not the first one to note that. Capacitance is a great mystery to me, the DRV8316 eval board from TI has even more, in the form of an electrolytic cap… I kind of modelled my choice on that, but since those are too big for my purposes I went with a bunch of ceramics. I think it is more than needed. You get a nice “afterglow” on the LEDs when you switch the power off
Yup, good find! Fixed it. That’s the dangers of creating your own footprints.
I was trying to order the tiny little breakout board from here: L6234 Breakout Board | Arduino-FOC
The Drotek L6234. But I realized I could just look at the SimpleFOCShield to see how the L6234 is hooked up
Oh that’s awesome! I saw the DRV8316 used in that other guy’s super cool board. Cutting edge stuff!
Wow. I would be honored to help in any way I can! I have a Feather m0 Basic, so I would have to use a breadboard. But yeah I would love to help test it!
I see that your board has pads instead of pin headers for the motor, so the DRV8316 is for high-performance motors? If so, that would work well for me, as the only motor I have right now is a 2207 1700kv drone motor.
By the way, I have some experience embedding the ATSAMD21G18A onto PCBs, and my end goal was to make an embedded SimpleFOC ESC with the SAMD21, so if that is something you guys want, I would gladly help with that. Maybe a SAMD21 + DRV8316 board?
It’s more of a lower end driver in terms of the power output, but its certainly high performance in terms of the features. It can do 3A continuous (with appropriate cooling) and 8A peaks. That is good for an integrated FET driver, but not much compared to what you can achieve with external FETs.
I guess it is designed to achieve higher integration for things that only need smallish motors. It’s cool because it completely integrates the current sensing without any external components. It’s certainly enough for a small drone, or RC-toy, camera gimbal or thing like that. It’s not enough for a race-drone, hoverboard or anything big.
Do you also like the SAME51? It has a bit more “oomph” for running the FOC algorithms, more TCC units and CAN-bus support…
Sorry for digging out this old thread, but I was searching the forum for L6234D and saw, that there was a sFOC shield supporting this chip.
I have an old Martinez gimbal controller with two drivers and Atmega 328 onboard.
I misused it 9 years ago for “the first BLDC balancing bot”
But now I want to run it with simpleFOC.
Q: does the current library still support this driver?
As I wrote, I was just a bit bored, because my sFOC mini order hasn’t arrived before weekend. I don’t blame you, it’s just a matter of fact.
So I tried to play with what i got.
Just for the record
The PWM pins of my Martinez controller are: 3,5,6 and 9,10,11 for the motors. All enable pins are permanently high.
I’ve already noticed the control loop is very slow when both motors run and that’s even without i2c MP6050 sensor involved.
For future projects, I picked the ESP32 as FOC-host. At least on paper it has the best bang for the buck ratio with 240MHz. Or does it miss some relevant functionality?