Hey guys,
I updated the controller and made a few improvements:
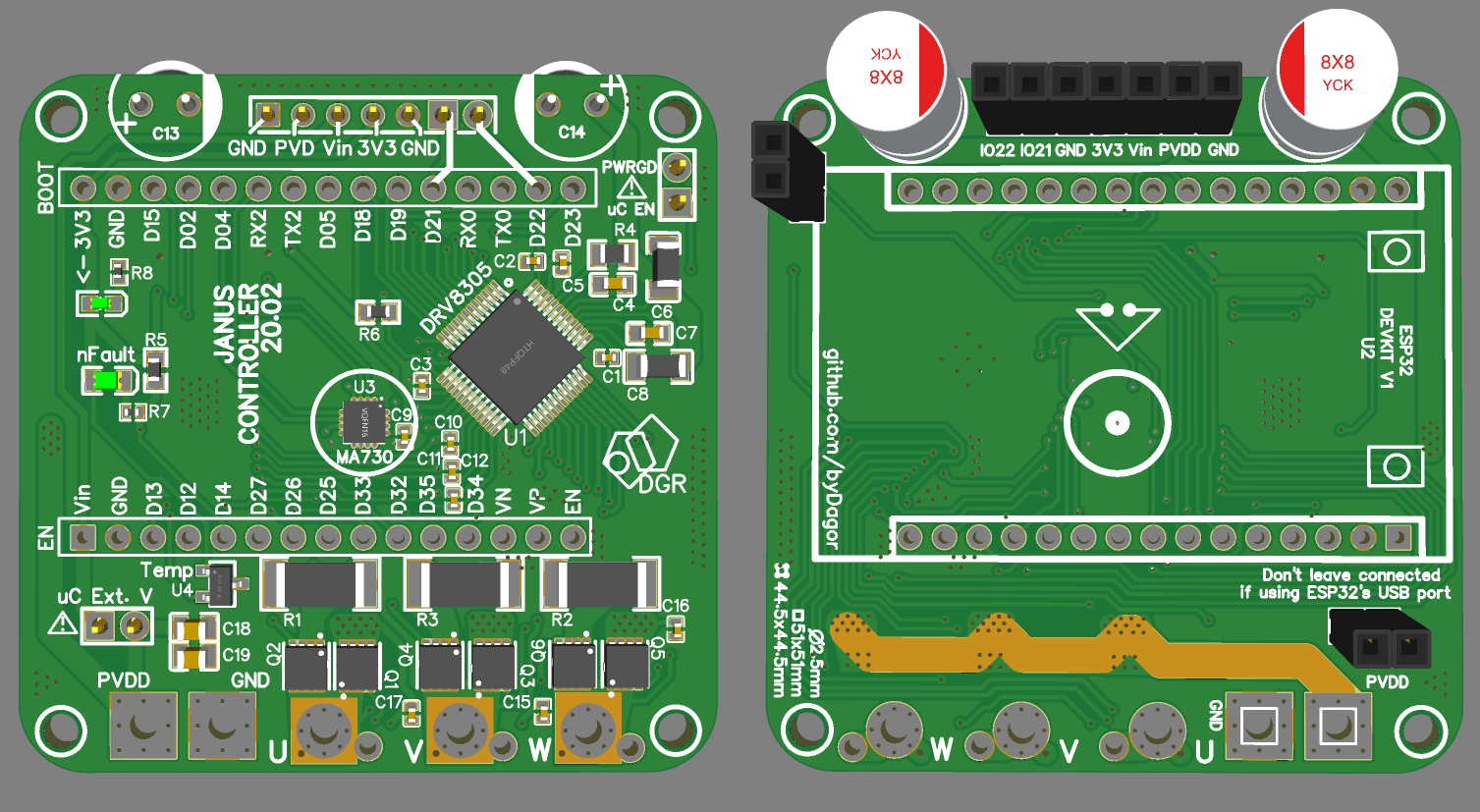
- Encoder’s SPI bus connected
- Moved encoder to the center of the board
- Added capacitors 18 and 19
- Differential current sensing routes with Kelvin connections
I will not order the new version soon, but I though I might just share the updated version if somebody feels like trying it out ![]()
David