@o_lampe and @runger Agree with the balancing part. The gimbal axes have been placed to pass through the center of mass, so the majority of the torque required from the motor will go into actually moving the camera.
As for the 1.5Nm requirement, that was given and I suspect there is some margin on that, so something around 1Nm should also probably work.
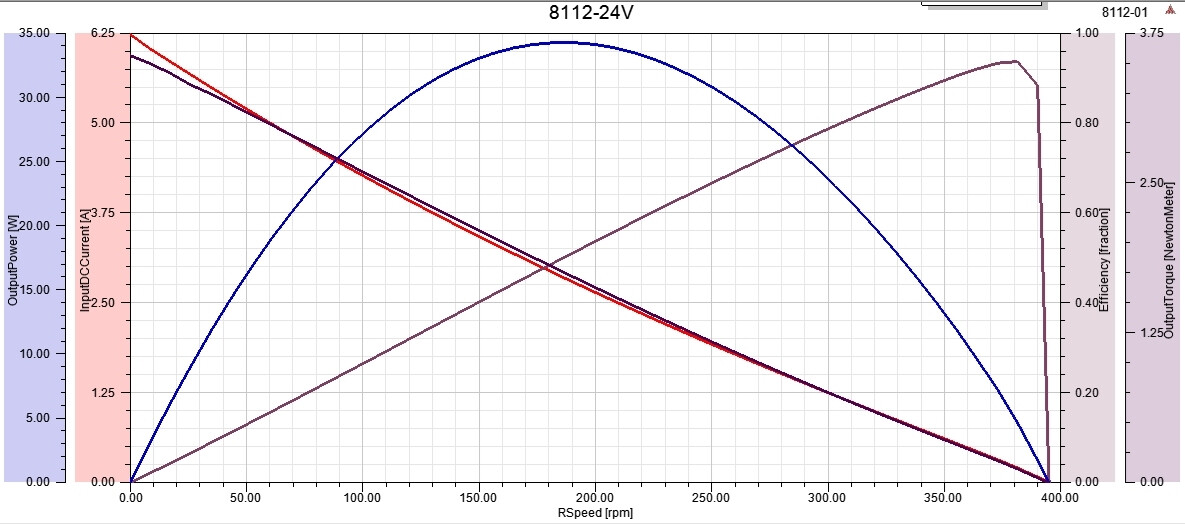
The nominal operating condition stated is at 2A and 20V producing torque around 0.8 Nm. The speed torque curve for this motor at 24V obtained from the vendor is given below. For a 2A current, the motor has approx 250 RPM speed and produces approx 1.2 Nm of torque. My question is, since gimbals are operating at really low speeds, it this the relevant operating condition to consider? Is not the operating regime more closer to 0 RPM near the stall torque?
Appreciate all the help!