I wrote a little routine to stop my BLDC/Hallsensor/SmoothingSensor setup to stop from jittering when velocity = 0.
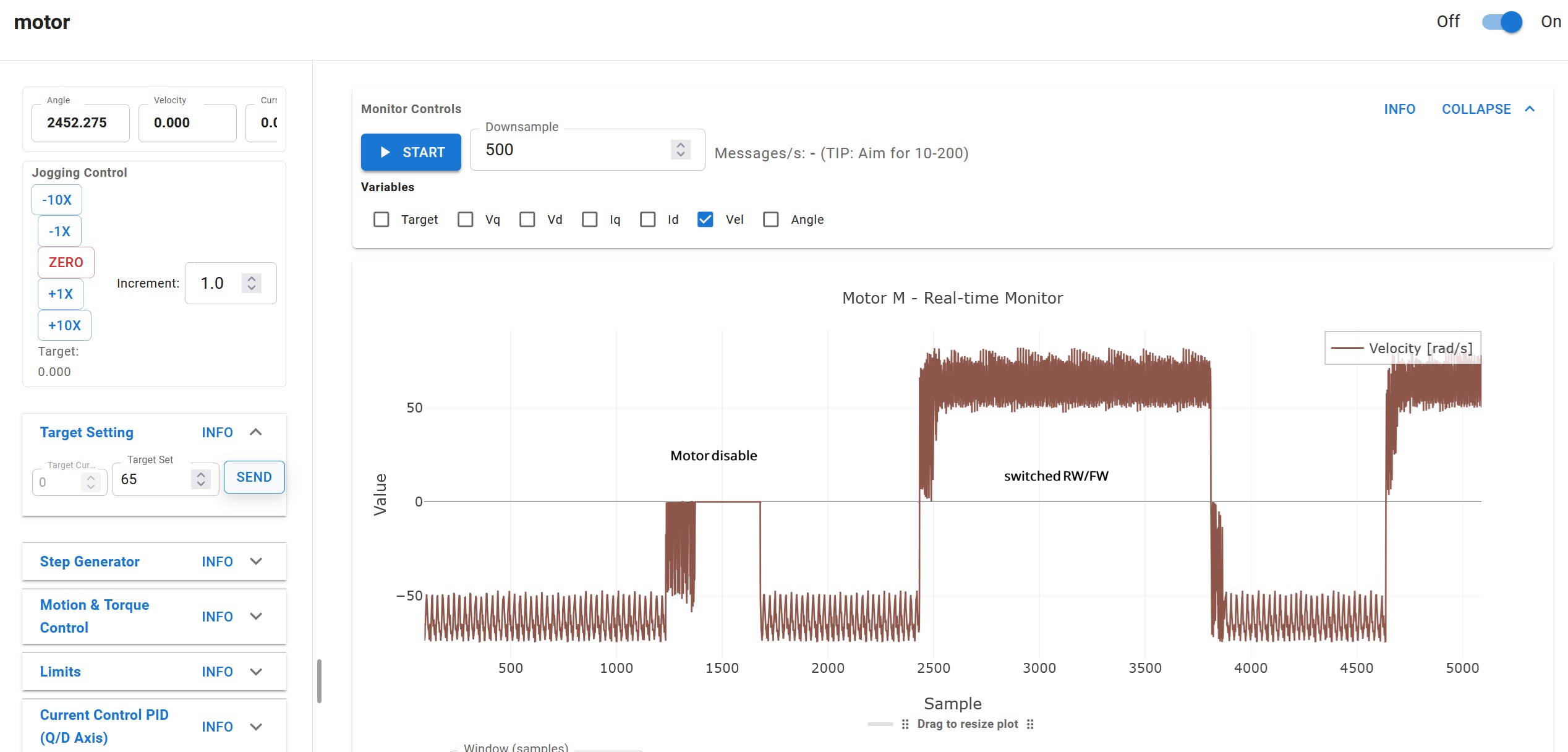
It worked so_so and needs PID fine tuning, but what I found more interesting is the difference between Reverse and Forward velocity.
I don’t think it’s related to my anti_jitter
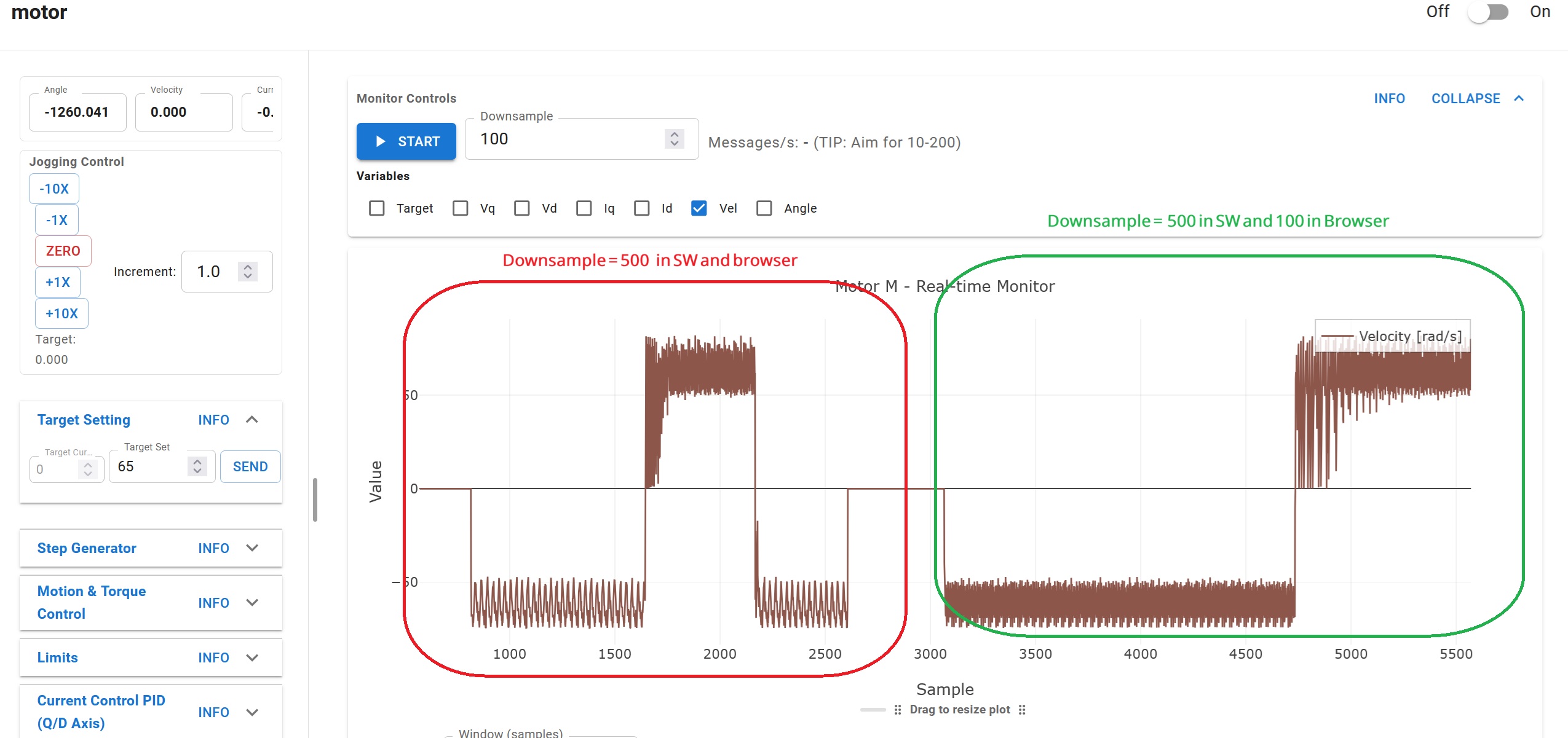
Gave it another shot without anti_jitter. It now seems to be related to motor.monitor_downsample ?
Re: zero_speed jitter.
I must admit, I was chasing my own tail…part of my code came from ChatGPT, because I needed phase resistance and kV. And the sample code I got had the numbers in wrong order. 
So, I tried to tune a motor with kV=1.1 and R= 273…