Hi @runger bit of an update, I have got almost everything working. I can’t get the PWM function working.
void* pwm1params;
pwm1params = _configure1PWM(1000, A_PWM);
_writeDutyCycle1PWM(50, pwm1params);
The analog write is working, so currently using that.
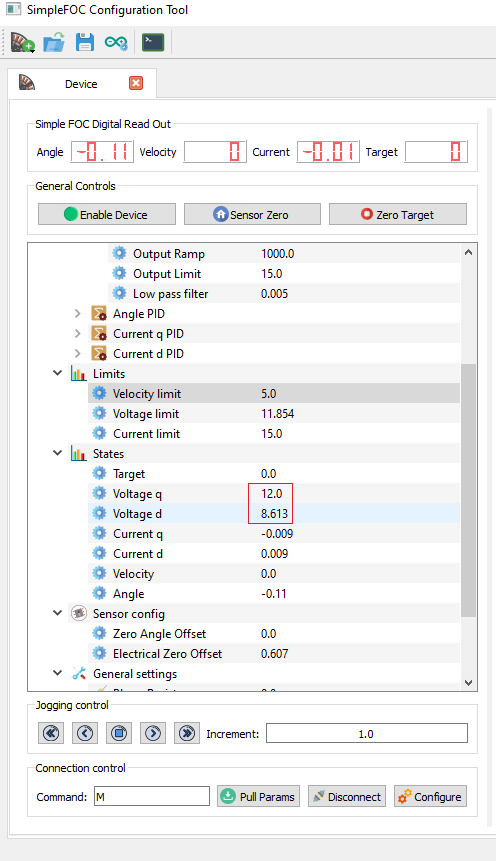
The other problem I have is when ever I disable the motor under load or in motion the PIDs keep calculating and give motor full voltage/current when I enable the motor again. Is there away to set all these to 0 and stop calculations while motor is disabled?
Here is the motor protection code for the B_G431B_ESC1 so far with braking and works well if anyone else is interested, it’s messy and unfinished, just add to your libs folder.
Header
#ifndef motorProtection
#define motorProtection
#include "Arduino.h"
#include <SimpleFOC.h>
class mpClass{
public:
//Declare all Functions
void begin();
void loop();
void reset();
float readVbus();
float readTemp();
void doMotorProtectCommand(char *command);
float mpPID(float SP, float PV, float P, float I, float D, float Min, float Max, float Cycle);
void linkMotor(BLDCMotor*);
void linkEncoder(Encoder*);
void linkBLDCDriver6PWM(BLDCDriver6PWM*);
void linkLowsideCurrentSense(LowsideCurrentSense*);
float brake_P = 1;
float brake_I = 10;
float brake_D = 0;
float brake_Min = 0;
float brake_Max = 250;
float brake_Cycle = 0;
unsigned long update = 1000;
float brakeEngageOffset = 0.25;
float brakeEngageMaxOffset = 2.0;
float brakeEngageMaxDisableOffset = 3.0;
float brakeCutOffPeriod = 250;
float temperature;
float tempCutOff = 60.0;
float tempDelayPeriod = 500;
float stallDelayPeriod = 100;
float stallCurrentOffset = 0.1;
float stallVoltageOffset = 0.1;
float overCurrentOffset = 0.05;
float overVoltageOffset = 0.05;
float overCVDelayPeriod = 100;
int mVelCnt = 6;
float mVelOffset = 1;
float mVelPeriod = 250;
int mAngleCnt = 8;
float mAngleOffset = 0.1;
float mAnglePeriod = 500;
int mCurrentQcnt = 10;
float mCurrentQoffset = 1.5;
float mCurrentQperiod = 100;
int mCurrentDcnt = 10;
float mCurrentDoffset = 1.5;
float mCurrentDperiod = 100;
int mVoltageQcnt = 10;
float mVoltageQoffset = 1.5;
float mVoltageQperiod = 200;
int mVoltageDcnt = 10;
float mVoltageDoffset = 1.5;
float mVoltageDperiod = 200;
class internal{
public:
bool oscillating(float input, int cnt, float offset, float period);
float input;
int cnt;
float offset;
float period;
private:
bool out;
bool outNew;
bool init;
float oldValue;
int cntUp;
int cntDown;
bool dirUp;
bool dirDown;
bool osOscillating;
};
private:
float VBus;
float pwmPID;
float pwmDuty;
bool motorVoscillation;
bool motorAoscillation;
bool currentQoscillation;
bool currentDoscillation;
bool voltageQoscillation;
bool voltageDoscillation;
byte brakeMode;
#define brakeOff 1
#define brakeEngage 2
#define brakeEngageMax 3
#define brakeEngageMaxDisableMotor 4
BLDCMotor* motor;
Encoder* encoder;
BLDCDriver6PWM* driver;
LowsideCurrentSense* currentSense;
};
#endif
#include "motorProtection.h"
//Motor Protections will disable motor
//Will self reset fault condition if in safe condition and allow you to enable motor again
//Motor Protection functions Include:
//Bus Overvoltage Braking
//Temperature Protection
//Stall Protection
//Over Current / Voltage Protection
//Oscillation Protection
//Link all objects from main ( not all are needed but here for future )
void mpClass::linkMotor(BLDCMotor *motorReference){
motor = motorReference;
}
void mpClass::linkEncoder(Encoder *encoderReference){
encoder = encoderReference;
}
void mpClass::linkBLDCDriver6PWM(BLDCDriver6PWM *driverReference){
driver = driverReference;
}
void mpClass::linkLowsideCurrentSense(LowsideCurrentSense *currentSenseReference){
currentSense = currentSenseReference;
}
//Create instance for function call per object
mpClass::internal VClass;
mpClass::internal AClass;
mpClass::internal CQClass;
mpClass::internal CDClass;
mpClass::internal VQClass;
mpClass::internal VDClass;
void mpClass::doMotorProtectCommand(char *mpCommand){
switch (mpCommand[0]){
case 'R':
reset();
break;
case 'D':
motor->disable();
break;
case 'E':
motor->enable();
break;
case 'V':
Serial.printf("Bus Voltage Reading: %f \n", readVbus());
break;
case 'T':
Serial.printf("G431 Temperature: %f \n", readTemp());
break;
}
}
void mpClass::reset(){
//Reset/Restart Driver reinitialize driver and motor calibration
//TODO
}
bool mpClass::internal::oscillating(float input, int cnt, float offset, float period){
if (!init){
oldValue = fabs(input);
init = true;
}
if (fabs(input) > (oldValue + offset)){
dirUp = true;
dirDown = false;
}
else if (fabs(input) < (oldValue - offset)){
dirUp = false;
dirDown = true;
}
else {
dirUp = false;
dirDown = false;
}
oldValue = fabs(input);
if (dirUp)cntUp++;
else if (dirDown)cntDown++;
if (cntUp >= cnt && cntDown >= cnt){
if(!osOscillating){
out = true;
osOscillating = true;
}
else{
out = false;
}
}
else{
out = false;
}
static long delayOscillating = millis();
if (millis() - delayOscillating > period) {
cntUp = 0;
cntDown = 0;
out = false;
osOscillating = false;
delayOscillating = millis();
}
return out;
}
//Important call from class and assign object for static variables!
//Must always be called in loop!
float mpClass::mpPID(float SP, float PV, float pGain, float iGain, float dGain, float Min, float Max, float Cycle){
static unsigned long previousMicros;
static float pErr;
static float Err;
static float P;
static float I;
static float D;
static float Out;
if (micros() - previousMicros >= Cycle) {
previousMicros = micros();
Err = (SP - PV);
P = (pGain * Err);
I = (I+(Err*iGain*Cycle));
if(I > Max) I = Max; //Prevent Integral windup
else if(I < Min) I = Min;
D = (dGain*(pErr-Err)/Cycle);
pErr = Err;
Out = (P + I + D);
if(Out < Min) Out = Min; //Clamp output to the limits
else if(Out > Max) Out = Max;
}
return Out;
}
float mpClass::readVbus(){
float vbus = _readADCVoltageLowSide(A_VBUS, currentSense->params);
vbus = vbus * 10.7711;
return vbus;
}
float mpClass::readTemp(){
float tADC = _readADCVoltageLowSide(A_TEMPERATURE, currentSense->params);
static const float ResistorBalance = 4700.0;
static const float Beta = 3425.0F;
static const float RoomTempI = 1.0F/298.15F; //[K]
static const float Rt = ResistorBalance * ((3.3F / tADC)-1);
static const float R25 = 10000.0F;
float temp = 1.0F/((log(Rt/R25)/Beta)+RoomTempI);
temp = temp - 273.15;
return temp;
}
void mpClass::begin() {
driver->voltage_power_supply = readVbus();
motor->voltage_limit = driver->voltage_power_supply;
}
void mpClass::loop(){
static unsigned long previousMicros;
if (micros() - previousMicros >= update) {
previousMicros = micros();
//Read Bus voltage
VBus = readVbus();
//Call PID
pwmPID = mpPID(driver->voltage_power_supply, VBus, brake_P, brake_I, brake_D, brake_Min, brake_Max, brake_Cycle);
//Disable Motor If bus voltage to high, otherwise let's dump it through brake resistor
static bool osBrake;
if (VBus > (driver->voltage_power_supply + brakeEngageMaxDisableOffset) && (motor->shaft_velocity > 0.01)) {
static long delay = millis();
if (millis() - delay > brakeCutOffPeriod && !osBrake) {
brakeMode = brakeEngageMaxDisableMotor;
SIMPLEFOC_DEBUG("Bus Voltage to high, Disable Motor: ", VBus);
delay = millis();
osBrake = true;
}
}
else if (VBus > (driver->voltage_power_supply + brakeEngageMaxOffset) && (motor->shaft_velocity > 0.01)) {
brakeMode = brakeEngageMax;
}
else if (VBus > (driver->voltage_power_supply + brakeEngageOffset) && (motor->shaft_velocity > 0.01)) {
brakeMode = brakeEngage;
}
else if (VBus < (driver->voltage_power_supply + 0.1)) {
brakeMode = brakeOff;
osBrake = false;
}
switch(brakeMode)
{
case brakeOff:
pwmDuty = 0;
break;
case brakeEngage:
pwmDuty = pwmPID;
break;
case brakeEngageMax:
pwmDuty = 245;
break;
case brakeEngageMaxDisableMotor:
pwmDuty = 250;
motor->disable();
break;
}
analogWrite(A_PWM, pwmDuty);
//TODO get the _writeDutyCycle1PWM working
//Should not be using analogWrite
//void* pwm1params;
//pwm1params = _configure1PWM(1000, A_PWM);
//_writeDutyCycle1PWM(0.5, pwm1params);
static bool osTemp;
temperature = readTemp();
if (temperature > tempCutOff){
static long delay = millis();
if (millis() - delay > tempDelayPeriod && !osTemp) {
motor->disable();
SIMPLEFOC_DEBUG("Driver Over Temperature, Disable Motor: ", temperature);
delay = millis();
osTemp = true;
}
}
else{
osTemp = false;
}
//Detect if motor has stalled and shutoff controller
static bool osStall;
if (fabs(motor->current.q) >= (motor->current_limit - stallCurrentOffset)) {
if (fabs(motor->shaft_velocity) < 0.01){
static long delay = millis();
if (millis() - delay > stallDelayPeriod && !osStall) {
SIMPLEFOC_DEBUG("Motor Stalled Current, Disable Motor: ", motor->current.q);
motor->disable();
delay = millis();
osStall = true;
}
}
}
else if (fabs(motor->voltage.q) >= (motor->voltage_limit - stallVoltageOffset)) {
if (fabs(motor->shaft_velocity) < 0.01){
static long delay = millis();
if (millis() - delay > stallDelayPeriod && !osStall) {
SIMPLEFOC_DEBUG("Motor Stalled Voltage, Disable Motor: ", motor->voltage.q);
motor->disable();
delay = millis();
osStall = true;
}
}
}
else{
osStall = false;
}
//Over Current and Over Voltage Protection
static bool osOverCV;
if ((fabs(motor->current.q) >= (motor->current_limit + overCurrentOffset))){
static long delay = millis();
if (millis() - delay > overCVDelayPeriod && !osOverCV) {
SIMPLEFOC_DEBUG("Motor Over Current, Disable Motor: ", motor->current.q);
motor->disable();
delay = millis();
osOverCV = true;
}
}
else if (fabs(motor->voltage.q) >= (motor->voltage_limit + overVoltageOffset)){
static long delay = millis();
if (millis() - delay > overCVDelayPeriod && !osOverCV) {
SIMPLEFOC_DEBUG("Motor Over Voltage, Disable Motor: ", motor->voltage.q);
motor->disable();
delay = millis();
osOverCV = true;
}
}
else{
osOverCV = false;
}
//Detect if Motor is in an uncontrollable state ie oscillating
motorVoscillation = VClass.oscillating(VClass.input = motor->shaft_velocity, VClass.cnt = mVelCnt, VClass.offset = mVelOffset, VClass.period = mVelPeriod);
motorAoscillation = AClass.oscillating(AClass.input = motor->shaft_angle, AClass.cnt = mAngleCnt, AClass.offset = mAngleOffset, AClass.period = mAnglePeriod);
currentQoscillation = CQClass.oscillating(CQClass.input = motor->current.q, CQClass.cnt = mCurrentQcnt, CQClass.offset = mCurrentQoffset, CQClass.period = mCurrentQperiod);
currentDoscillation = CDClass.oscillating(CDClass.input = motor->current.d, CDClass.cnt = mCurrentDcnt, CDClass.offset = mCurrentDoffset, CDClass.period = mCurrentDperiod);
voltageQoscillation = VQClass.oscillating(VQClass.input = motor->voltage.q, VQClass.cnt = mVoltageQcnt, VQClass.offset = mVoltageQoffset, VQClass.period = mVoltageQperiod);
voltageDoscillation = VDClass.oscillating(VDClass.input = motor->voltage.d, VDClass.cnt = mVoltageDcnt, VDClass.offset = mVoltageDoffset, VDClass.period = mVoltageDperiod);
if (motorVoscillation ||
motorAoscillation ||
currentQoscillation ||
currentDoscillation ||
voltageQoscillation ||
voltageDoscillation){
SIMPLEFOC_DEBUG("Motor Oscillating, Disable Motor");
motor->disable();
}
if (motorVoscillation) SIMPLEFOC_DEBUG("Motor Shaft Velocity Oscillating");
else if (motorAoscillation) SIMPLEFOC_DEBUG("Motor Shaft Angle Oscillating", motorAoscillation);
else if (currentQoscillation) SIMPLEFOC_DEBUG("Motor current Q Oscillating");
else if (currentDoscillation) SIMPLEFOC_DEBUG("Motor current D Oscillating");
else if (voltageQoscillation) SIMPLEFOC_DEBUG("Motor voltage Q Oscillating");
else if (voltageDoscillation) SIMPLEFOC_DEBUG("Motor voltage D Oscillating");
}
}
How to use: Add these your main file
//Motor Protection Instance
mpClass mProtection;
void doProtection(char *cmd){
mProtection.doMotorProtectCommand(cmd);
}
//ADD to your Setup/Begin
pinMode(A_PWM, OUTPUT);
//Enable SimpleFOC Debugging
SimpleFOCDebug::enable(&Serial);
// use monitoring with serial
Serial.begin(115200);
//Call at end of your setup!
//Motor Protection Settings
//Link all objects for motor protection class
mProtection.linkMotor(&motor);
mProtection.linkEncoder(&encoder);
mProtection.linkBLDCDriver6PWM(&driver);
mProtection.linkLowsideCurrentSense(¤tSense);
//Protection update rate in microseconds
mProtection.update = 250;
//Brake PID Paremeters
mProtection.brake_P = 10;
mProtection.brake_I = 100;
mProtection.brake_D = 0;
mProtection.brake_Min = 0;
mProtection.brake_Max = 250;
mProtection.brake_Cycle = 0;
//Brake Trigger (driver power supply + Offset amount above vbus)
mProtection.brakeEngageOffset = 0.25;
mProtection.brakeEngageOffset = 2.0;
mProtection.brakeEngageMaxDisableOffset = 3.0;
mProtection.brakeCutOffPeriod = 200;
//Temperature Settings
mProtection.tempCutOff = 60.0;
mProtection.tempDelayPeriod = 500;
//Stall Detection
mProtection.stallDelayPeriod = 100;
mProtection.stallCurrentOffset = 0.1;
mProtection.stallVoltageOffset = 0.1;
//Over Current/Voltage Protection
mProtection.overCurrentOffset = 0.05;
mProtection.overVoltageOffset = 0.05;
mProtection.overCVDelayPeriod = 100;
//Oscillating Detection
//Shaft Velocity
mProtection.mVelCnt = 6;
mProtection.mVelOffset = 1;
mProtection.mVelPeriod = 250;
//Shaft Angle
mProtection.mAngleCnt = 8;
mProtection.mAngleOffset = 0.1;
mProtection.mAnglePeriod = 250;
//Current Q
mProtection.mCurrentQcnt = 10;
mProtection.mCurrentQoffset = 1.5;
mProtection.mCurrentQperiod = 250;
//Current D
mProtection.mCurrentDcnt = 10;
mProtection.mCurrentDoffset = 1.5;
mProtection.mCurrentDperiod = 250;
//Voltage Q
mProtection.mVoltageQcnt = 10;
mProtection.mVoltageQoffset = 1.5;
mProtection.mVoltageQperiod = 250;
//Voltage D
mProtection.mVoltageDcnt = 10;
mProtection.mVoltageDoffset = 1.5;
mProtection.mVoltageDperiod = 250;
//Add Cammand for Motor Protection
command.add('P', doProtection, (char*)"Motor Protection");
//Call Motor Protection Setup
_delay(500);
mProtection.begin();
//Run this in the loop after motor.move
//Call Motor Protection Loop
mProtection.loop();
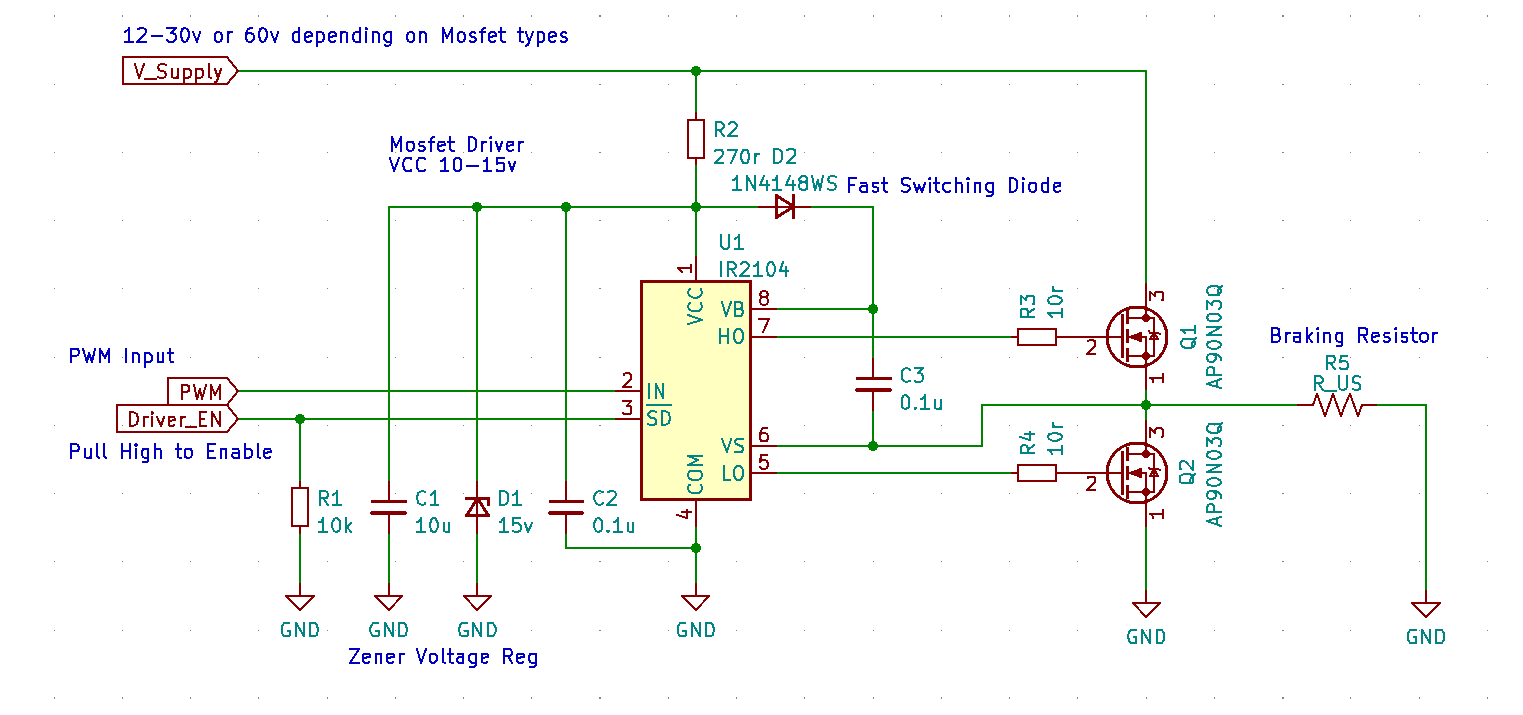
Here is the braking circuit I am using with the B_G431B_ESC1
Hopefully it helps others and is a good start, I will add to my github when I have everything working correctly