My take
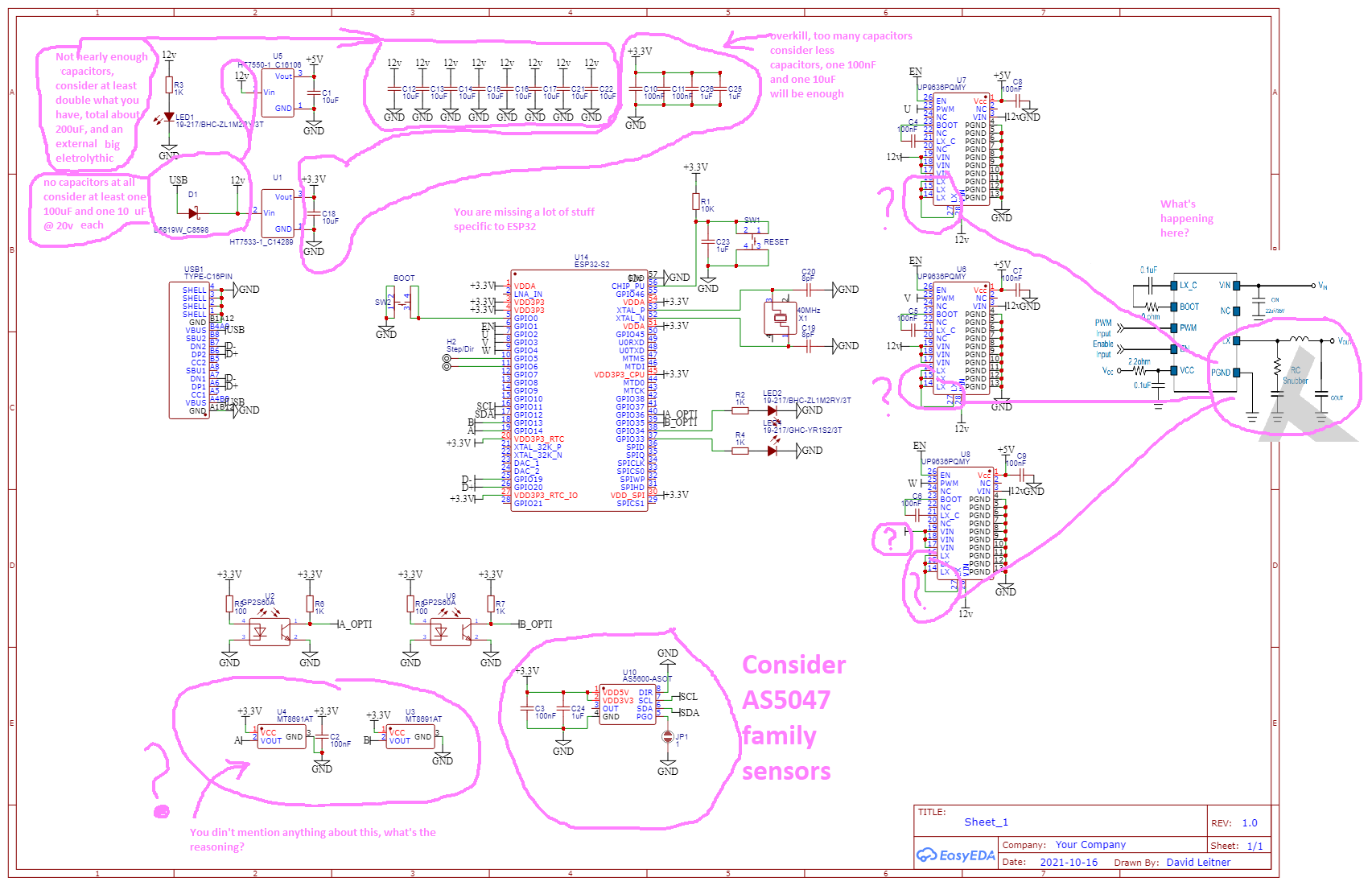
Are the 12V all on the same rail? If that’s the case then you can ignore the 12v no capacitors at all, and perhaps consider separating the rails, then adding some? I have a lot more comments but they won’t fit here. Also the Holtek LDOs aren’t nearly powerful enough to run the ESP, you are looking at something at least 1A draw with a big tantalum capacitor. Also the power surges and ringing back from the MOSFETS will kill any LDO and fry your ESP. Check this thread to see what are you up against: