You say shoot thru? Did you burn some mosfets? I don’t know the best way to address everything, so I hope what I say doesn’t come off condescending or anything. I’m only trying to help.
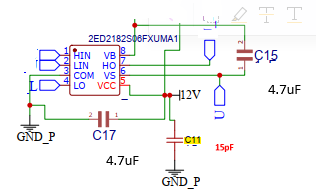
I would make sure that the gate drivers have both bulk capacitance (I think you are calling this C17?) as well as decoupling capacitance. I would imagine this to be a 100nF ceramic capacitor that will react to very fast switching first, then a bulk capacitor like a 4.7 to 22uf capacitor to provide the large current needed to overcome gate capacitance. 1nf is not anywhere near enough, 0.1uF/100n is typically the minimum, 470nF might start stealing enough of the cap’s ESR to defeat the point of having a decoupling capacitor to begin with, going more towards bulk. If you have very sensitive stuff going on, maybe then you also add 10nf in parallel. 1nf is tinytiny, I’ve only seen used for RC circuits. Remember that certain ceramic dielectrics like x5r lose like 50% or more of their rated capacitance when approaching the rated DC voltage, for that bulk cap. Tant or poly with low ESR are the best!
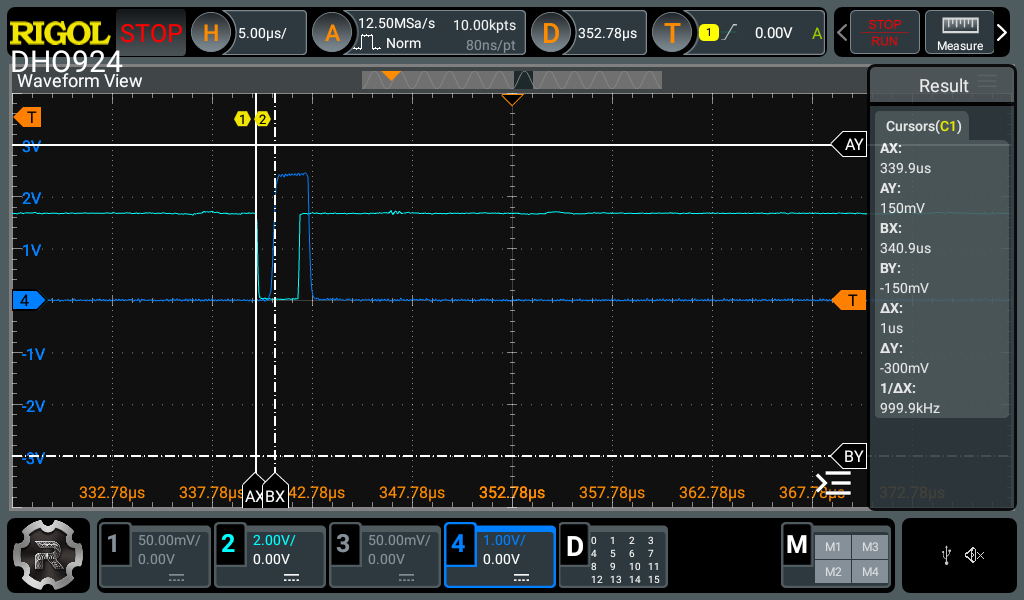
Do you have battery voltage capacitance near the mosfets as well? I do not see any pictured, Essentially a snubber capacitor? I do not believe this is negotiable. Your battery’s impedance is never zero, (always remember this!!!) that plus the switching of inductive loads are going to spike voltages like crazy if there is no fast place to pack that energy! Could that be why you see current spikes?
The battery or source impedance is also why 10X bootstrap bulk capacitance to the gate driver supply is also non-negotiable, BTW!
You need proper capacitance on the boost side of the gate driver, it is imperative that this capacitor does not discharge because that will settle the mosfet in the linear range and it will release the smoke pretty dang quick. I haven’t looked at the code, or your gate driver, but it also needs an undervoltage protection that prevents the upper gate from even trying till this capacitor is charged otherwise the result is the same as using a capacitor that is too small.
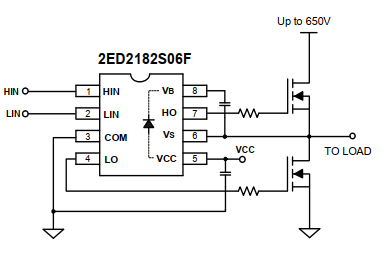
Last, it looks like your gate driver has a built in boot diode and resistance. Sometimes that isn’t going to provide enough current, so it might be necessary to use an external boot diode and series resistor. Internal diode drivers usually give a boot diode resistance, but since you aren’t doing anything crazy I doubt this is your issue.
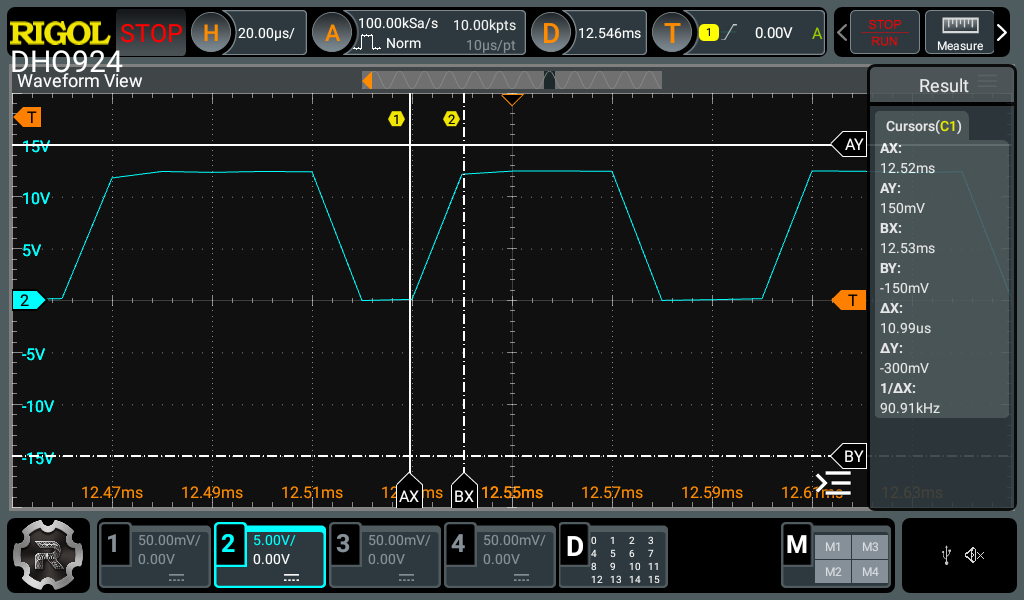
As to gate resistance, I believe you want it as small as possible without introducing harmonics (not sure if that is the right word, maybe ringing?) I think google might explain better than I do here, so I’d search for “tuning h-bridge gate drivers.” and take it from there. The datasheet for a TMC5160 stepper driver has a very good section that explains choosing gate resistors and adding additional components that might let you switch faster without negative repercussions, plus an example (great scope traces!!) It also goes into detail on how there is no set value for this stuff, maybe outside very expensive software to simulate the PCB at the very lowest level. Asking for a globally good gate drive resistor is kinda a half baked question, maybe we can offer one that will switch at 75% of “the best”, but chasing the last bit requires measurement.
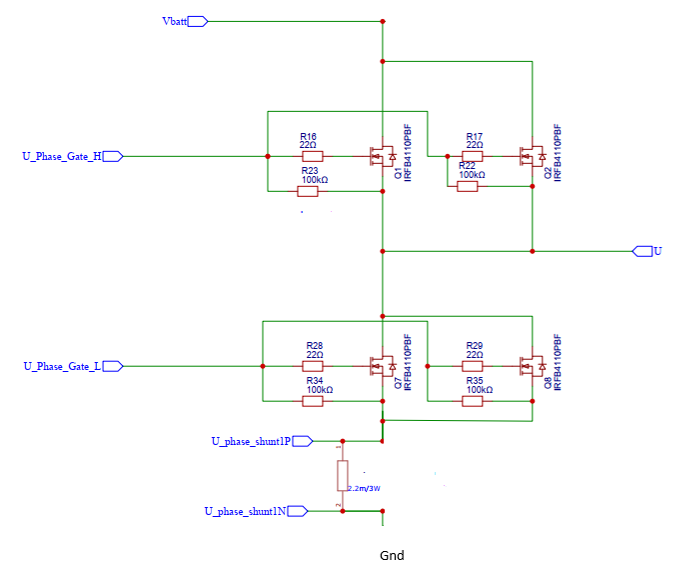
Are R22-R35 intentional? I would remove them. Gate drivers both source and sink current, those serve no purpose unless I am missing something?
Hope that helps!! Happy to hear where I might be mistaken, because I’m still learning too.