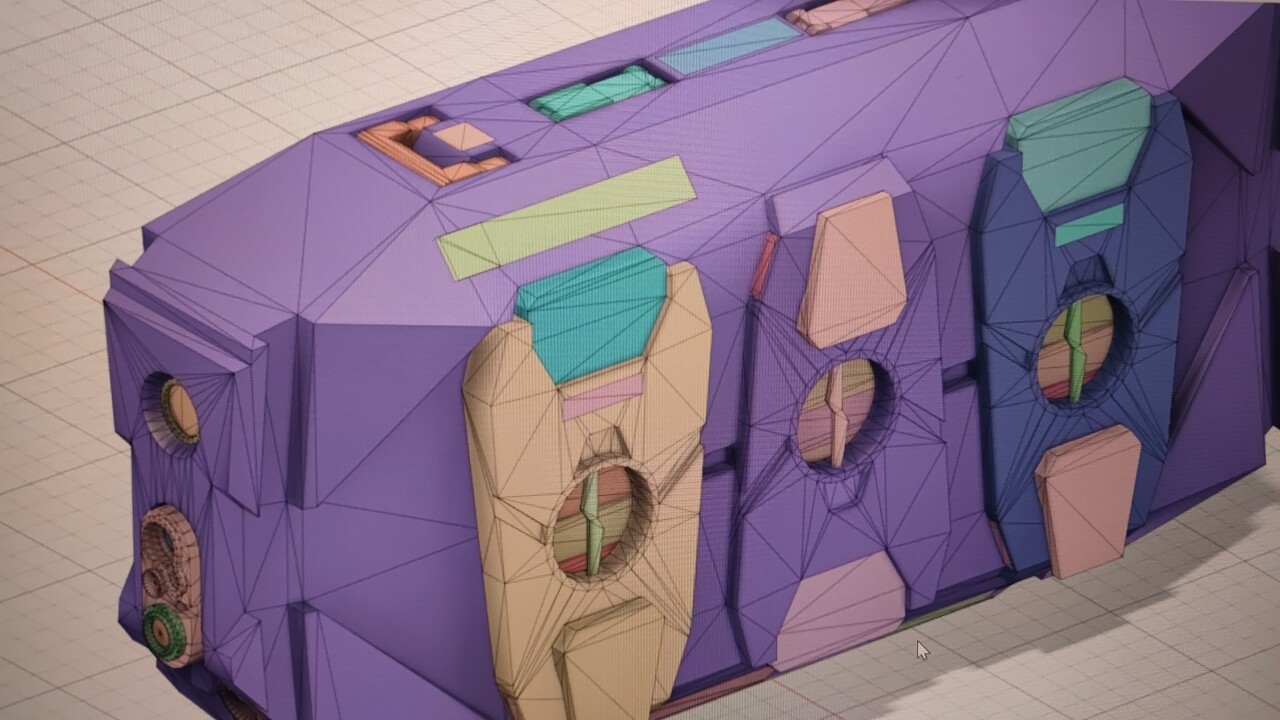
Hey so just wanted to flex a bit as building some totally pointless and potentially over engineered toy inspired by a Wyvern Drone from Cyberpunk 2077 game.
Just sharing some progress on the project.


Uploading: Slack Image (2021-10-22_14-19-02).jpg…



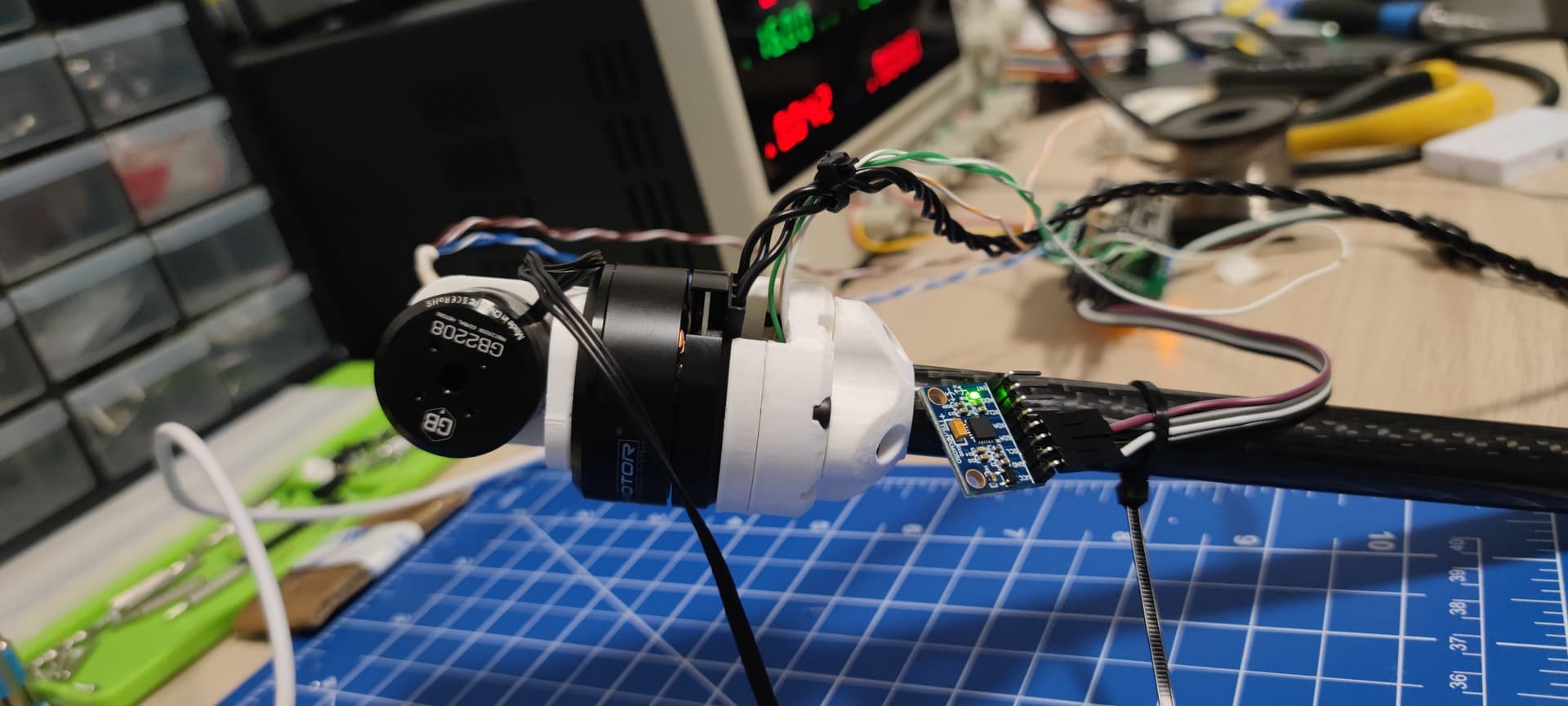
I use T-Motor GB2208 for pitch and GB36-1 for roll..
AS5600 encoders.
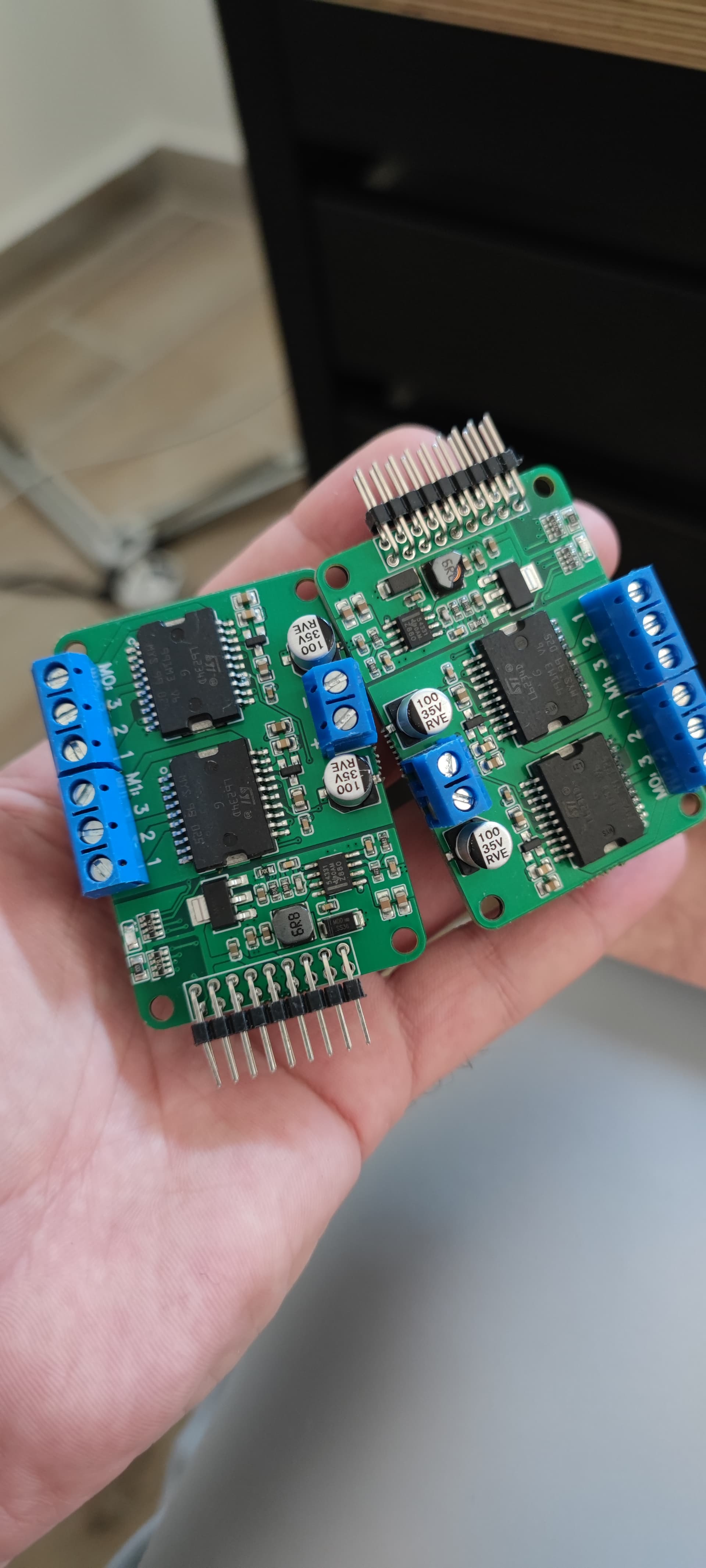
Custom dual driver Deng he L6432 driver without current sense. Planning to sidechain INA chip a bit later.
Controlled by ESP32.
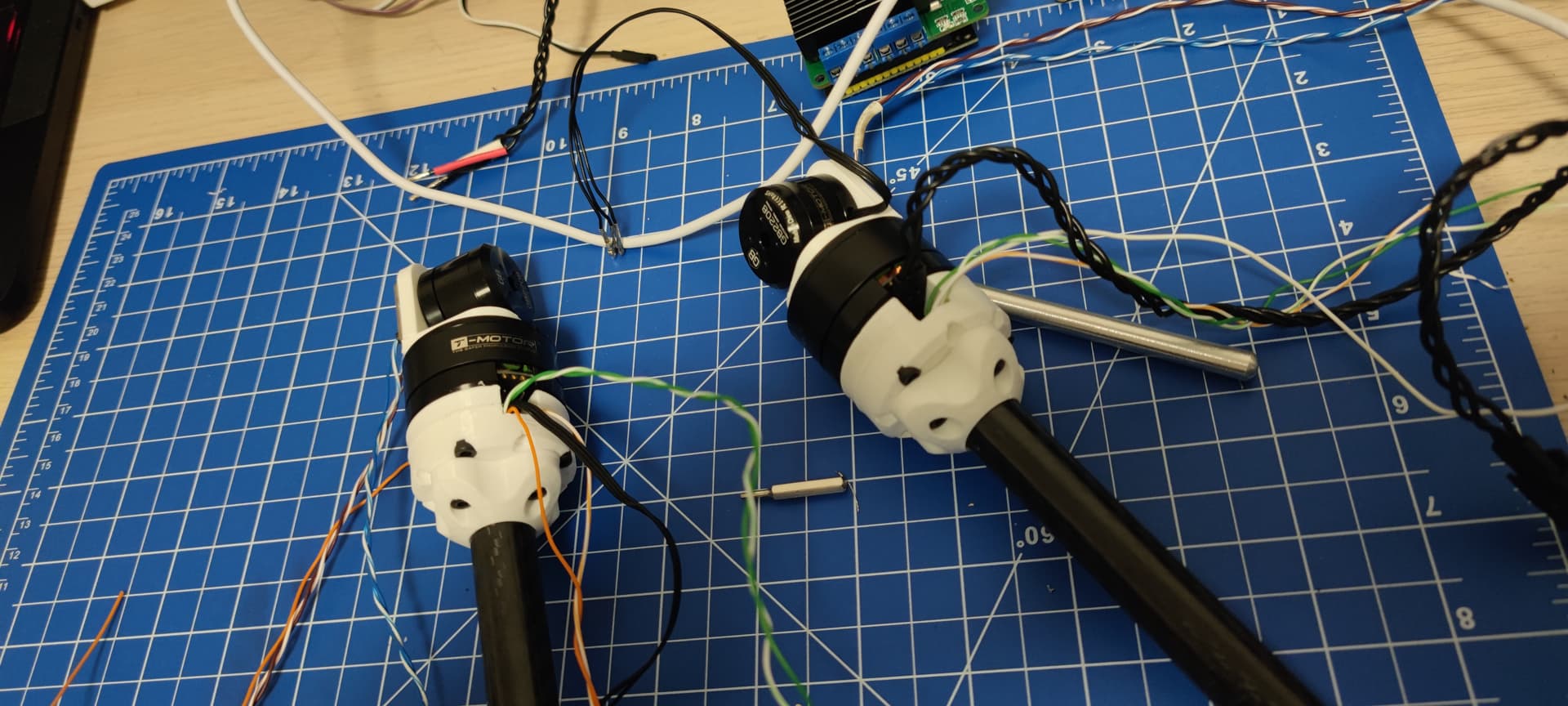
Assembled final actuator set mounted on carbon rod
Latest Update:
Somewhat tuned my Tmotor PID for smooth rotation.
And controlling it by MPU6050.
Figured that I want to getAngle from MPU6050 and multiply it by pi/2 for that 90 Deg rotation alignment.

