Hello all,
I am new here, is this still an active community? I wanted to use parts listed on this site for my project but many of them are no longer sold.
Anyway, I would like to share what I am doing and get some critiques because I honestly have no idea what I am doing.
So here’s the project:
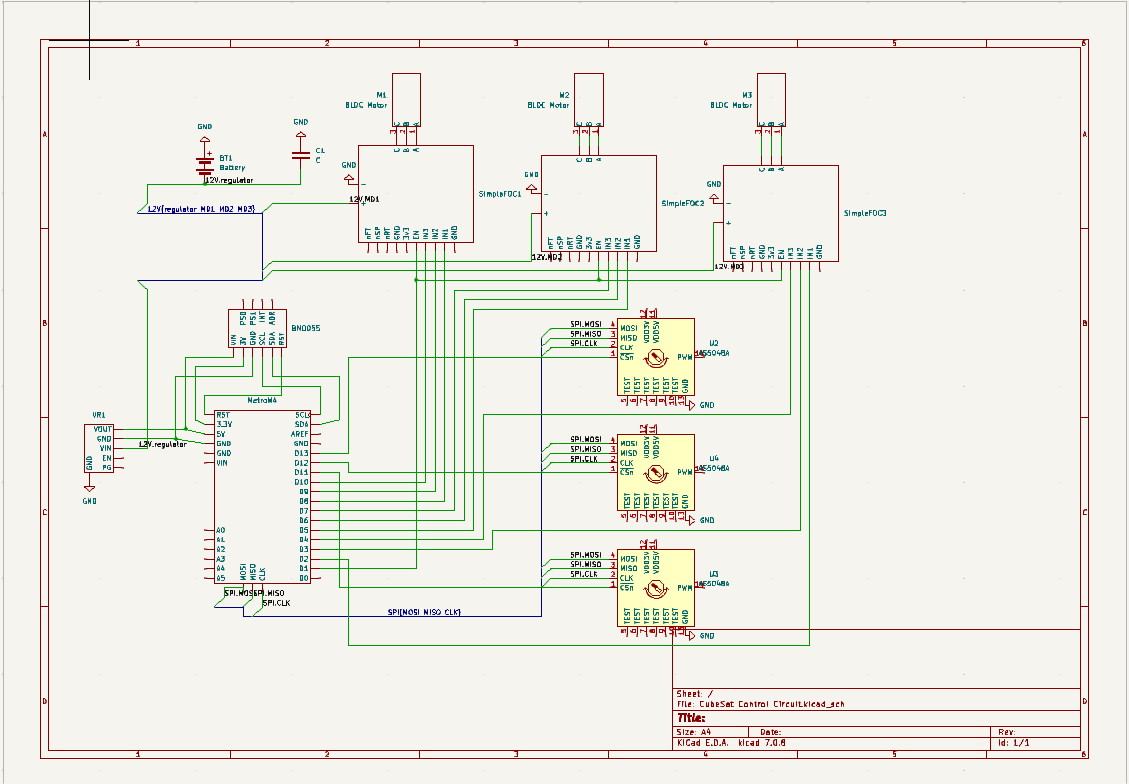
I am designing a demo of 3-axis satellite pointing using reaction wheels.
Parts list:
MC: Adafruit MetroM4 Airlift Lite
IMU: Adafruit BNO055
Motors: 3x RCTimer 90KV Gimbal Motors
Motor Drivers: 3x SimpleFOC Minis
Encoders: AS5048A Magnetic Encoders
Power: 3S LiPo Battery, 5V step-down regulator (for MC power)
Various 3D printed components
The attached schematic is mostly to help me visualize and I’m certain I violated a thousand conventions in it but if you can look past that I would appreciate critique if you see any glaring issues with the setup. Also if you think there will be any compatibility issues with the components I am using; most of them have not arrived yet.
Thanks for reading!
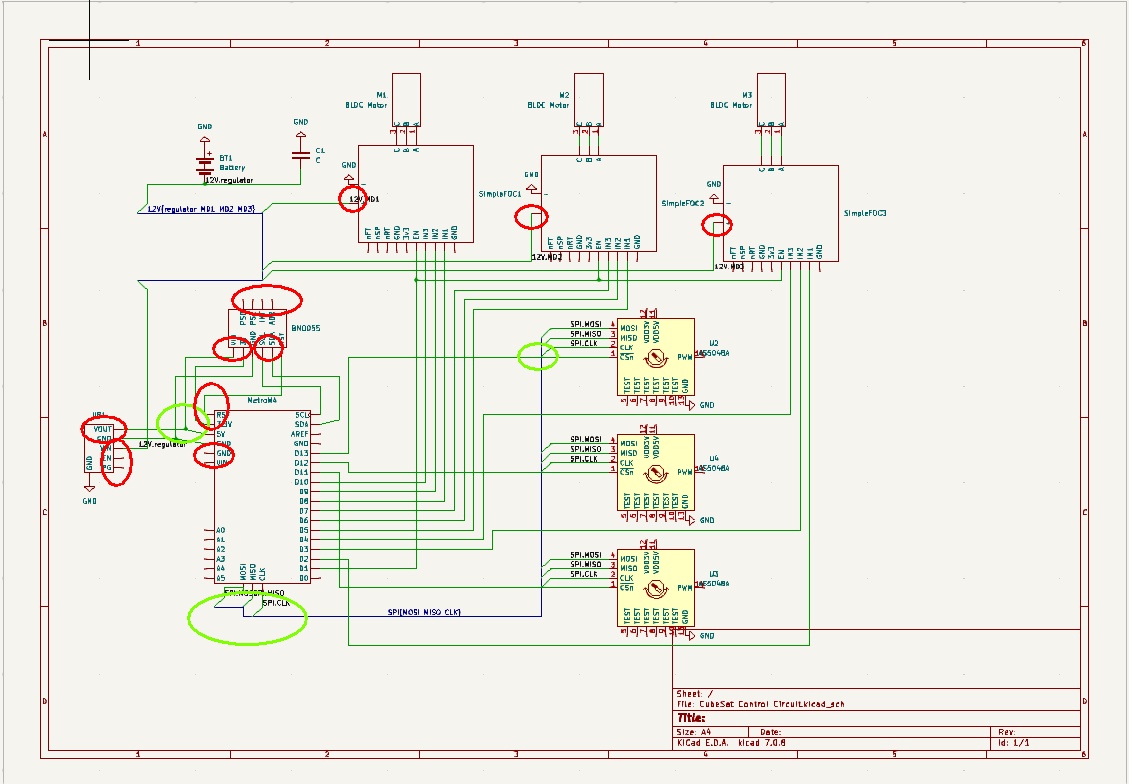
usually, one big cap by motor, one decoupling cap , at least. BNO055 ? whatza?
– iso14000