I’ve been working on a camera enclosure with a spinning window (clear view screen in the ship world, Visiport or similar in the CNC world) to keep the camera lens clear while videoing inside my CNC mill with coolant flying everywhere.
I was initially going to go air driven. But an early prototype was annoyingly noisy. I then decided to build a BLDC motor into the enclosure. But going with a guesstimate to avoid hurting my brain with math resulted in the wrong number of turns which meant way more RPM than I needed, high current draw and a difficult to start motor. But it did at least work as a proof of concept. So now it’s onto V2 and I thought I’d get some opinions from the brainy folk here to save me wasting a pile of time again.
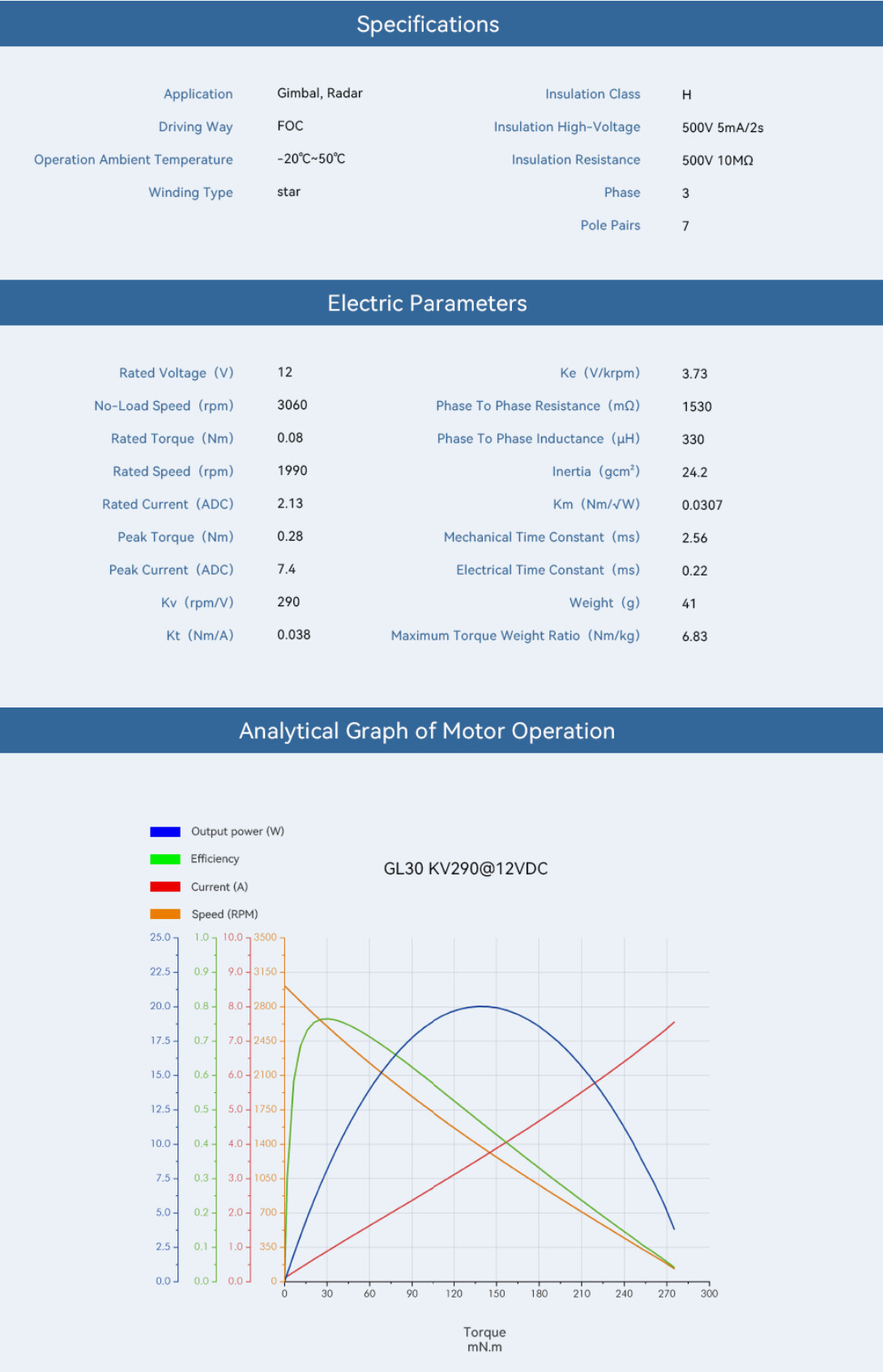
While building a BLDC motor was a fun project. I’m not keen to spend hours winding copper wire again lol. So, I’m looking at using a gimbal motor as the hollow shaft will allow the design to work mechanically. While expensive, I think the T-Motor/CubeMars GL30 will be a good fit as it seems to be one of the few gimbal motors that will achieve the target I have of about 2200rpm for the project.
Would the SimpleFOCMini be a suitable controller for this application? FOC is not necessary for precision control, it just needs to do an approximate fixed RPM. Closed loop is probably not necessary, though coolant hitting the enclosure would create a variable load which might mess things up in open loop mode? I also believe using an FOC control over a regular hobby ESC should be a lot quieter which is another reason I ended up looking at this option.
Pretty hardcore, making your own motor for this project!!
2000+ RPM is pretty fast for a gimbal motor, check the specs carefully. If you’re operating it near its maximum values then the current draw and therefore the heat generated will probably be quite high and it’s unclear how long you can operate it at that speed.
A drone prop motor might be more the thing, but these are harder to control due to their lower resistance, and not the best match for a SimpleFOC mini. and they generally don’t have hollow shafts. For the mini, try to find a motor with a winding resistance >5ohm.
Also the mini can’t supply big currents, so make sure the motor can actually achieve the speed you need within the mini’s capabilities…
Also for heat reasons you don’t want to use open loop mode for any length of time. FOC mode will be much more efficient and cooler, and you’ll be able to run the motor forever, by the sounds of what you’re planning.
And yes, velocity mode will be enough to get you a fairly stable rpm once you have tuned the system. And yes, you can expect FOC to be much quieter, although of course spinning an enclosure at 2200 RPM will make some noise.
Please send us some pics of your project, if you want to share
One of the reasons I liked the GL30 was the detailed specs they provide. But I’ve just gone back to check and found the specs listed are conflicting lol. The general description suggests a Rated Voltage of 12V, and a KV of 290, so in theory a max RPM of 3,480. But it lists the rated speed as 2200rpm which is why I thought it might be suitable. However the actual specification sheet (Included below) has 1990 for the rated speed. Which would probably still be fine if it could do that constantly.
Drone prop motors was where I looked first as I have a few of them around already. The biggest issues is mechanically with the lack of a hollow shaft. But they are also generally wound for much higher RPM than I am needing, or are huge and provide way more torque than necessary.
FOC mode requires a position sensor of some form? Was trying to avoid a position sensor as it’ll be difficult to integrate with the mechanical design, though I did find a post from you I believe which had a sensor which can work off center. Currently running with an Insta 360 GO3S so, 40 mins at a time, but might look at security cameras for machine monitoring down the line which would be essentially running forever.
I’m too new to post multiple pictures. Here’s one with a few images combined showing the first version and CAD work in progress of the one we are discussing.
looking at those curves it seems like you’d be between 1-2A continuous to hold 2000 RPM or so. Probably this will work, but you might need some cooling. It’s within the range of the mini, but it might get warm.
Yes - there is code for sensorless commutation for STM32 MCUs, but its work in progress by the community… in the meantime you need a rotor position sensor. When you’re trying to use the hollow shaft, it’s hard to use most of the sensors. The “Incoder” type sensors would work, presumably, if you have lots of spare cash
Will likely be running a bit of compressed air through the housing to keep the inside of the glass clear of condensation. This was an issue the one time I tested the first version. This should give a bit of cooling and a bit of positive internal pressure will also help to keep coolant from getting in where it shouldn’t as sealing it up fully would add too much load.
Can hopefully design around the AS5048A that seems quite common while utilizing the center hole. Seems less of a headache than dealing with the mechanics of an encoder.
Will post more when I get some time to work on building it.