Good morning, this is my first post in this community. I am a software developer and I regularly build things in my free time, with an increasing share of projects including electronics.
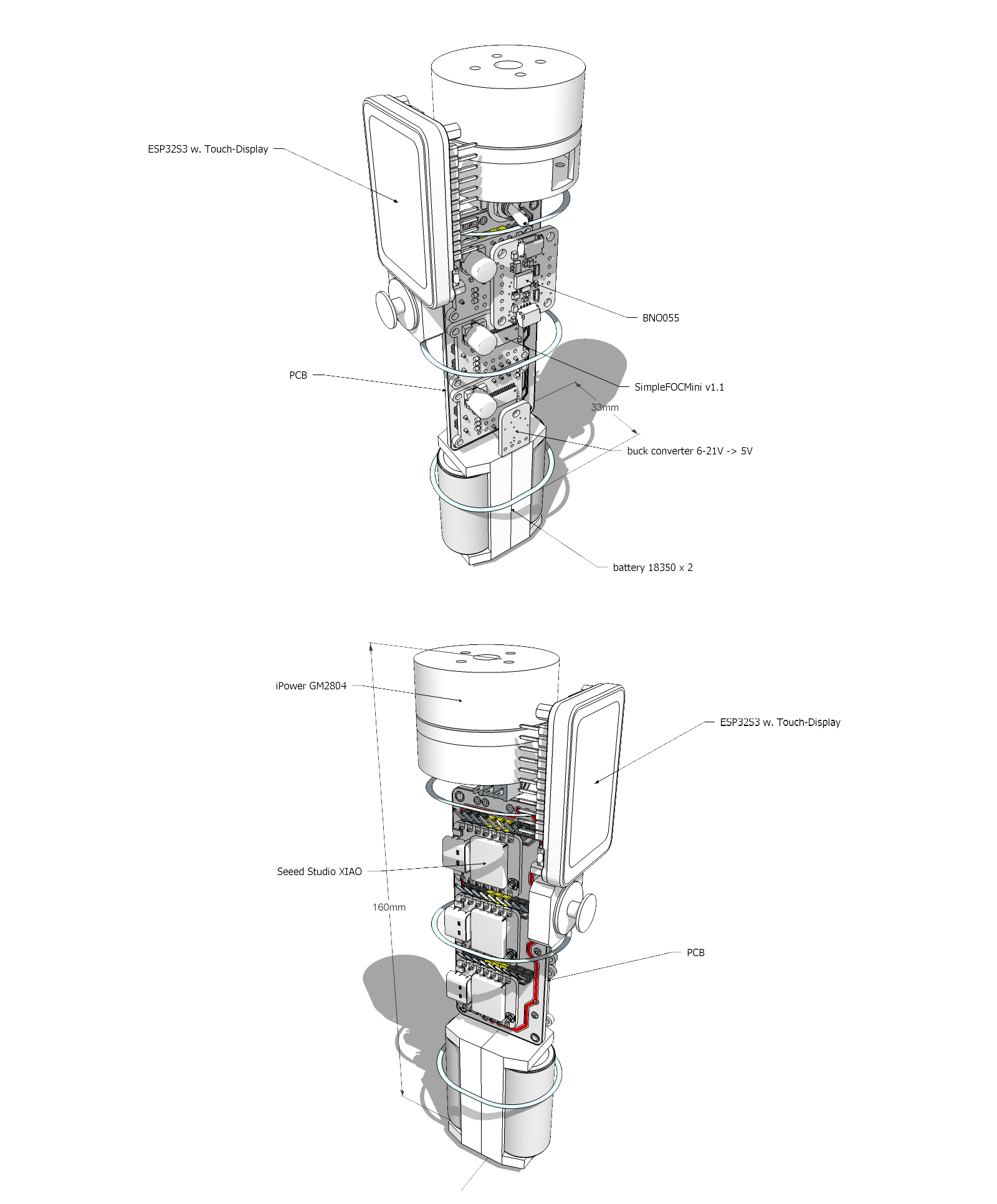
I wanted to understand BLDC motors for a while and somehow the idea of building a camera gimbal was born. I got myself a few simplefoc mini 1.0 boards off AliExpress and more recently an iPower GM2804 motor and I have been able to set up open and closed loop control using a seeed xiao esp32-s3 that I had lying around. The gimbal would require 3 motors, which even an esp32-s3 with many ports broken out would not be able to handle, so I thought using 3 units of seeed esp32-s3 and simplefoc mini could be a possibility. Each unit would only have the task of controlling a single motor. The 3 units would sit on a simple custom PCB to reduce cable salad. Finally there would be a 4th controller reading from a bosch bno055 imu sensor that I already have from another project. That 4th controller would do the math of converting sensor orientation to motor angles and communicating those angles over UART to the 3 motor controller units.. Everything would fit into a reasonably sized handle.
My question is whether I am missing something that obviously will not work. Also I am not sure if the ~8V delivered by the 2 18350 batteries will be sufficient. Please let me know if you see general problems with the idea. Looking forward to your criticism.
Hi, thank you for your thought, time and answer. Not thinking about battery discharge was obviously a naive approach, thanks for pointing that out. I did some testing with multiple devices on a single UART channel which appeared to work when only one primary device talks and all other devices only listen and never talk. Will look into SPI chaining though. I have absolutely no experience regarding the torque that the small motor will be able to provide, but I am ready to iterate on the design. That's the part I enjoy a lot in such projects, build, find problems, learn, change.
– h.fleischer