Hello everyone,
My objective is to build the world’s most springy, smooth, and compact gimbal BLDC motor (direct-drive)–driven robot arm using SimpleFOC, and this post marks my starting point. I have chosen the T-Motor GB series motors for this project.
I would like to share my current results and gather any meaningful advice you are willing to offer on how I can improve my SimpleFOC implementation for gimbal BLDC motors, specifically for position and velocity control.
I am also interested in learning about any proven, reliable BLDC drivers (up to 24 V and with built-in current sensing) that you use frequently and would recommend. My design philosophy would be to use a MCU and a driver along with all the bits on each motor hooked to a central MCU via SPI/UART to interface with my ROS2 PC with a USB A cable.
At the moment, I am working with the following hardware:
-
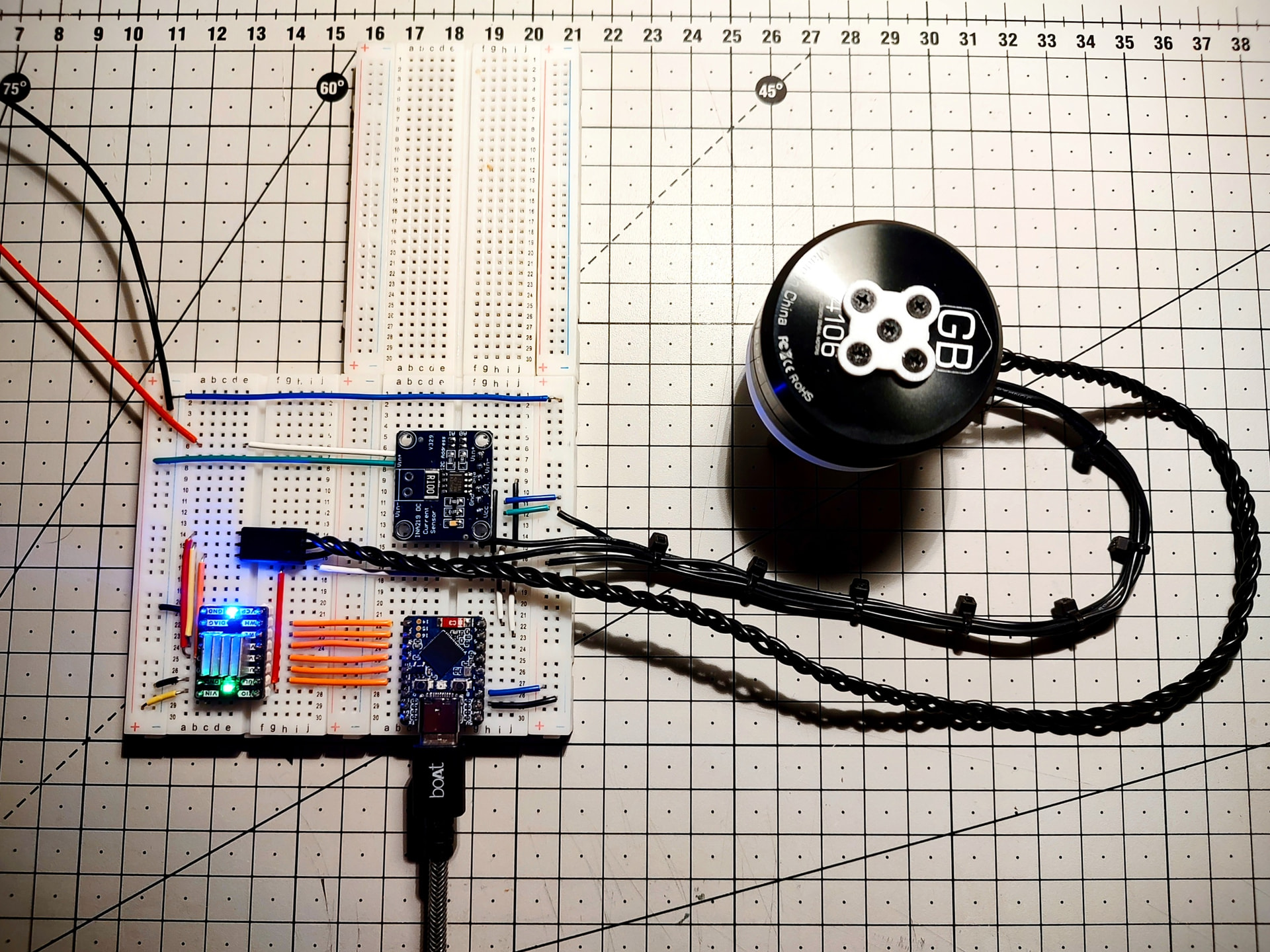
T-Motor GB4106
-
TMC6300 (three-phase driver)
-
Osram AS5600 (encoder)
-
ESP32-S3 Zero (a.k.a. the mini version)
-
INA219 (current sensor)
I havent decided on what electronics I would go with, again I will start with the best Motor driver and discover the other stuff on the way.
At the moment here are my results.
Here is the code (Below) I have developed based on the tutorials. It is functional and has been thoroughly tested. Below, you will also find several PID charts that I generated using a Python script. The methodology was to move the motor from Position A to Position B, capture the encoder data, and plot it on a graph. This allowed me to tune the PID parameters to achieve the smoothest possible motion.
I would appreciate any feedback on the PID graphs as well, particularly suggestions on how they could be further improved.
The command parameters used are:
- Target angle
- Velocity P
- Velocity I
- Velocity D
- Velocity LPF
- Angle P
- Voltage limit
#include <SimpleFOC.h>
#include <Wire.h>
// ---------------- Pins ----------------
const int phU_h = 11;
const int phU_l = 12;
const int phV_h = 9;
const int phV_l = 10;
const int phW_h = 7;
const int phW_l = 8;
// ---------------- Motor ----------------
// 12N14P motor → 7 pole pairs
BLDCMotor motor = BLDCMotor(7);
// ---------------- Driver ----------------
// TMC6300 → 6PWM
BLDCDriver6PWM driver = BLDCDriver6PWM(
phU_h, phU_l,
phV_h, phV_l,
phW_h, phW_l
);
// ---------------- Sensor ----------------
// AS5600 via I2C
MagneticSensorI2C sensor = MagneticSensorI2C(AS5600_I2C);
// ---------------- Commander ----------------
Commander command = Commander(Serial);
// -------- Commander callbacks --------
// Angle target (radians)
void doAngle(char* cmd) {
command.scalar(&motor.target, cmd);
}
// Velocity PID tuning (still used internally!)
void doVP(char* cmd) { command.scalar(&motor.PID_velocity.P, cmd); }
void doVI(char* cmd) { command.scalar(&motor.PID_velocity.I, cmd); }
void doVD(char* cmd) { command.scalar(&motor.PID_velocity.D, cmd); }
void doVLPF(char* cmd) { command.scalar(&motor.LPF_velocity.Tf, cmd); }
// Angle PID tuning
void doAP(char* cmd) {
command.scalar(&motor.P_angle.P, cmd);
}
// Voltage limit
void doVlim(char* cmd) {
command.scalar(&motor.voltage_limit, cmd);
}
void setup() {
Serial.begin(115200);
delay(1000);
// ---------------- I2C ----------------
Wire.begin(6, 5); // SDA, SCL
// ---------------- Sensor ----------------
sensor.init();
motor.linkSensor(&sensor);
// ---------------- Driver ----------------
driver.voltage_power_supply = 10.4;
driver.init();
motor.linkDriver(&driver);
// ---------------- Control mode ----------------
motor.controller = MotionControlType::angle;
// ---------------- Angle PID ----------------
motor.P_angle.P = 25.0; // start here (typical range 5–20)
// ---------------- Velocity PID (inner loop) ----------------
motor.PID_velocity.P = 0.5;
motor.PID_velocity.I = 0.1;
motor.PID_velocity.D = 0.001;
motor.LPF_velocity.Tf = 0.02;
motor.PID_velocity.output_ramp = 300;
// ---------------- Limits ----------------
motor.voltage_limit = 10.4; // VERY important in angle mode
//motor.velocity_limit = 20.0; // limits snap speed
// ---------------- Monitoring ----------------
motor.useMonitoring(Serial);
// ---------------- Init ----------------
motor.init();
motor.initFOC();
// ---------------- Commander ----------------
command.add('A', doAngle, "Target angle [rad]");
command.add('P', doVP, "Velocity P");
command.add('I', doVI, "Velocity I");
command.add('D', doVD, "Velocity D");
command.add('L', doVLPF, "Velocity LPF");
command.add('Q', doAP, "Angle P");
command.add('V', doVlim, "Voltage limit");
Serial.println("=================================");
Serial.println("Closed-loop ANGLE FOC READY");
Serial.println("Commands:");
Serial.println(" A <rad> - target angle");
Serial.println(" Q <val> - angle P");
Serial.println(" P/I/D/L - velocity PID");
Serial.println(" V <volt> - voltage limit");
Serial.println("=================================");
delay(1000);
}
void loop() {
// -------- FOC loop --------
motor.loopFOC();
// -------- Angle control --------
motor.move();
// Print velocity (optional, for debugging)
Serial.println(sensor.getAngle(), 6);
// -------- Commander --------
command.run();
}
PID Graphs results: This was captured Raw encoder values converted to radians vs time stamps. Here’s a video to demostrate the “Return to Position“.
Link to the Graphs - Google Drive
Heres the initial setup.
Have a nice day,
~Roland