The advantage of this design is that all 4 wheels are completely self-sufficient and if you damage the electronics on one of the wheels the other 3 will keep functioning.
200A per wheel is a whole lotta power. You could use low ohm power motors instead of gimbals.
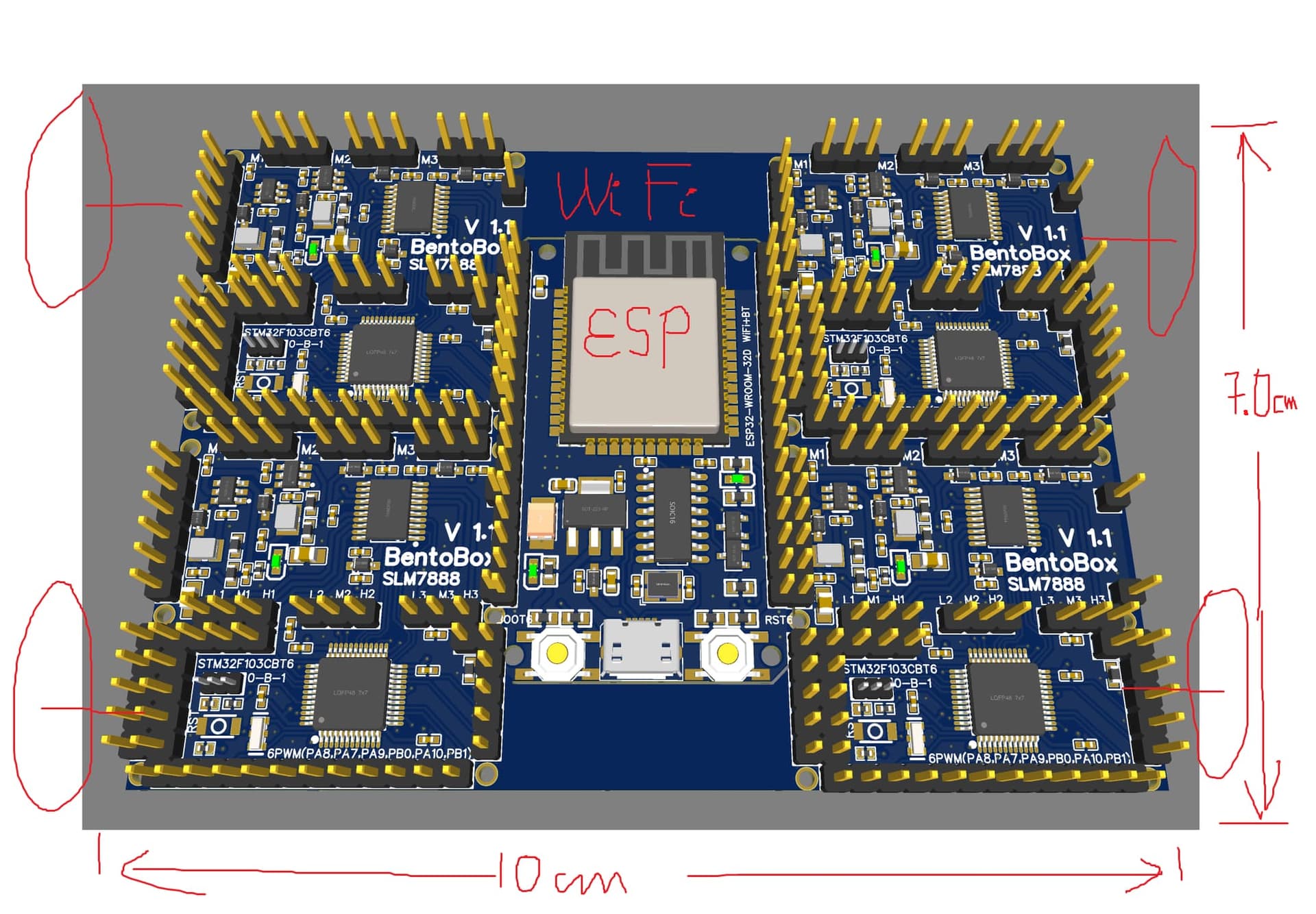
Do not confuse this with a quad-copter ESC which controls 4 propellers with one MCU. This one is completely different, and you can sensor each wheel separately, and each wheel could perform completely different independent tasks
That could be a good fit for 3lb weight class, although the large board size might make it hard to fit around some designs. WiFi is also not amazing for control. An earlier 1lb bot I made used an ESP32 6xN20 Brushed motors, and the weird DRV8912, which is a 12x half bridges, with SPI controlled PWM drivers.
BLE is better though, and the esp32 has that too. Lately I’ve been sticking to the NRF52 series though because it’s dramatically more power efficient and I like the APIs better.
This design is quite neat. Are the drivers on the bottom? Also, why so many 0.1" pins? Are they just fancy vias for isolation?
Wouldn’t separate modules connected by some kind of bus have the advantage (in this context) of higher re-use?
Assuming the robot doesn’t just smash all its opponents every time, but occasionally takes some damage, isn’t the chance of recovering at least some working modules when using separate motor modules higher than with the large central PCB?