SimpleFOC Community
3D Printed Robot Arm - Acceleration / Deceleration Planner Algorithm?
Antun_Skuric
March 31, 2023, 9:20am
39
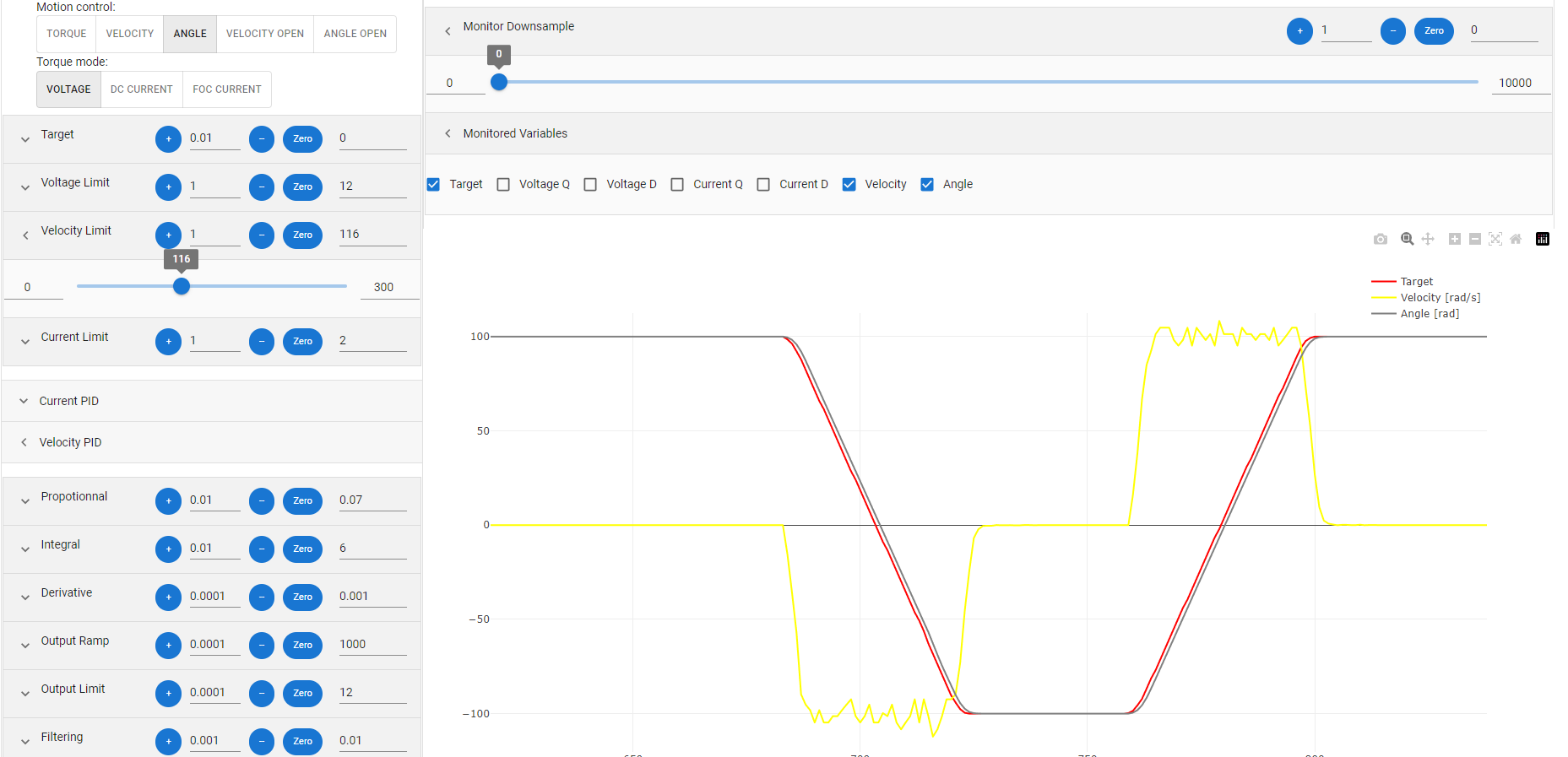
A quick test of the code
max vel: 100rad/s
max accel: 500 rad/s^2
without velocity feed-forward:
image
1857×897 80.5 KB
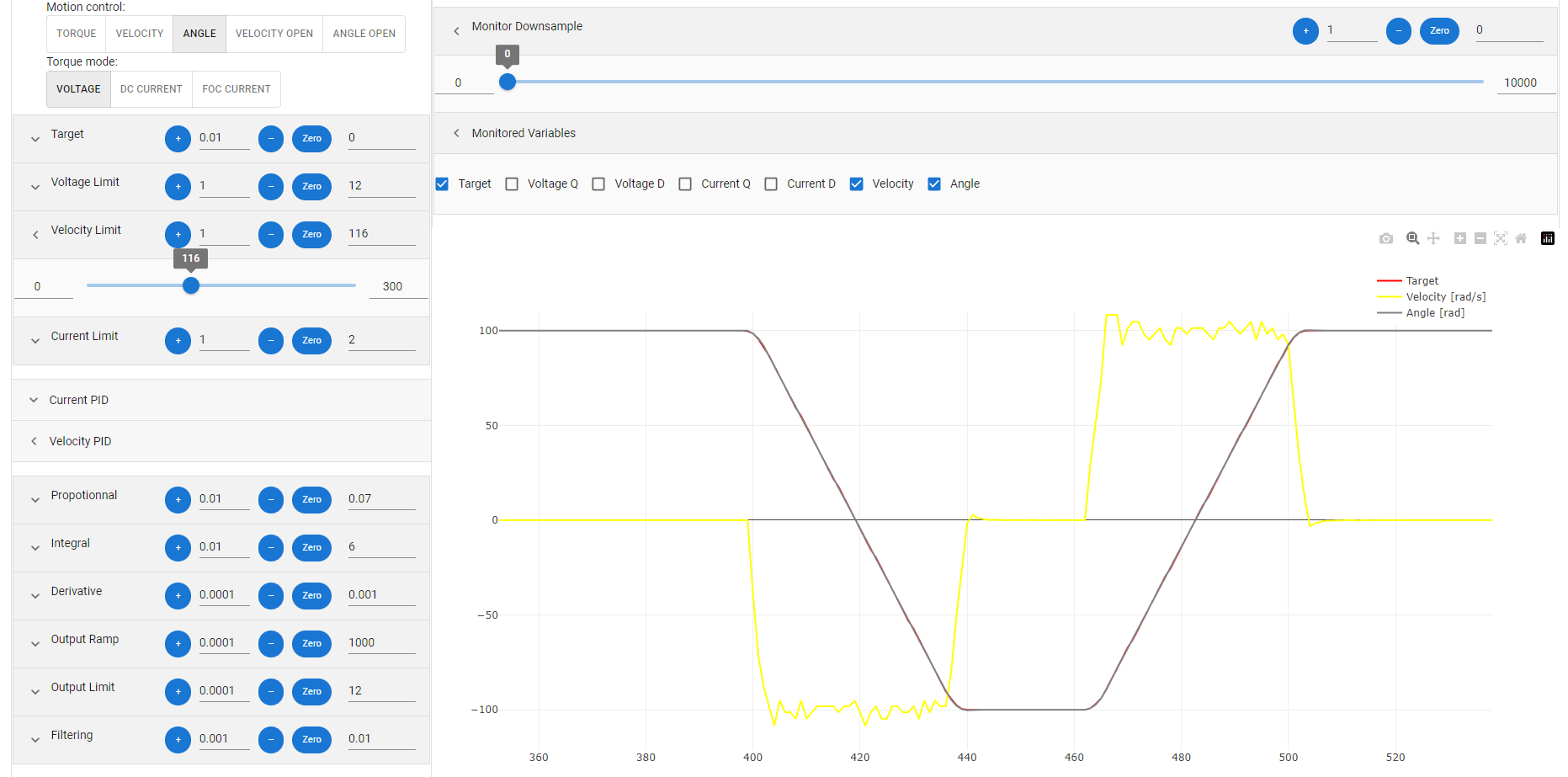
with the feedforward:
image
1863×923 82.6 KB
show post in topic