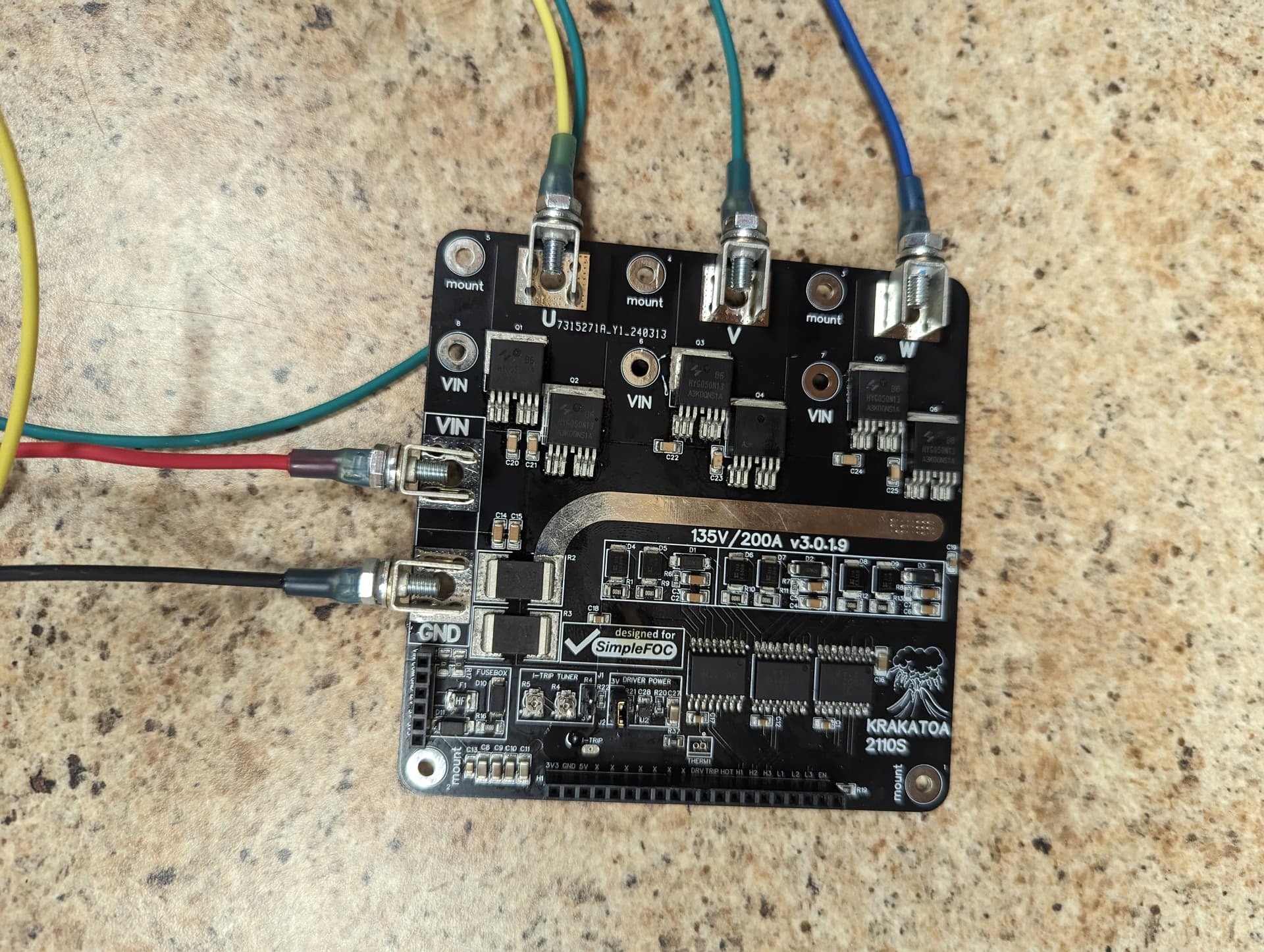
Continuing to use this board to learn from.
(Note the 3 amp fuse).
I am not quite sure what to expect out of the drivers.
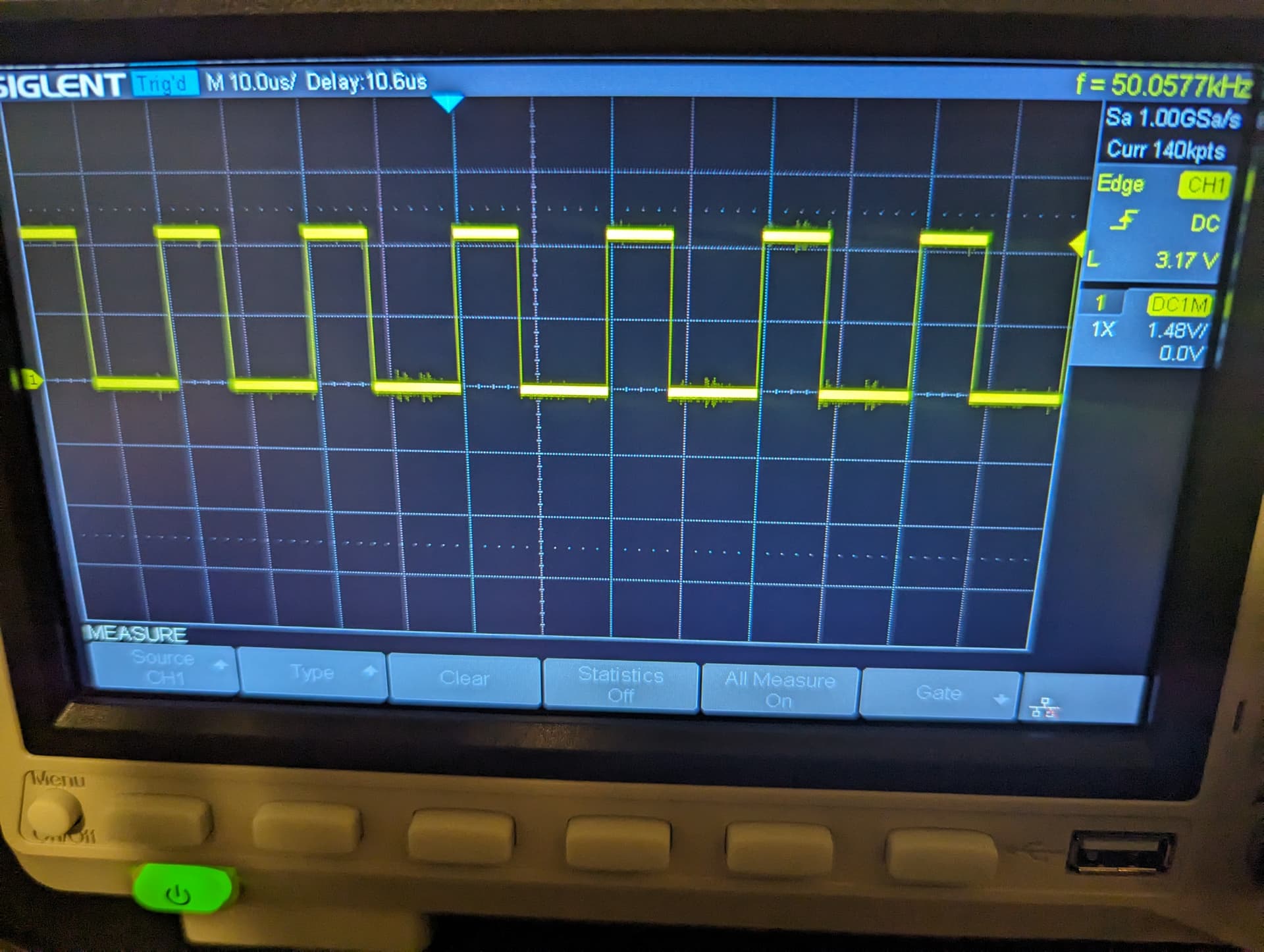
I have the open loop velocity example loaded up and have square waves present on the appropriate pins ( B13-A10), 12v present on c17, c12, c1. I expected to see some square waves on the outputs of the drivers.
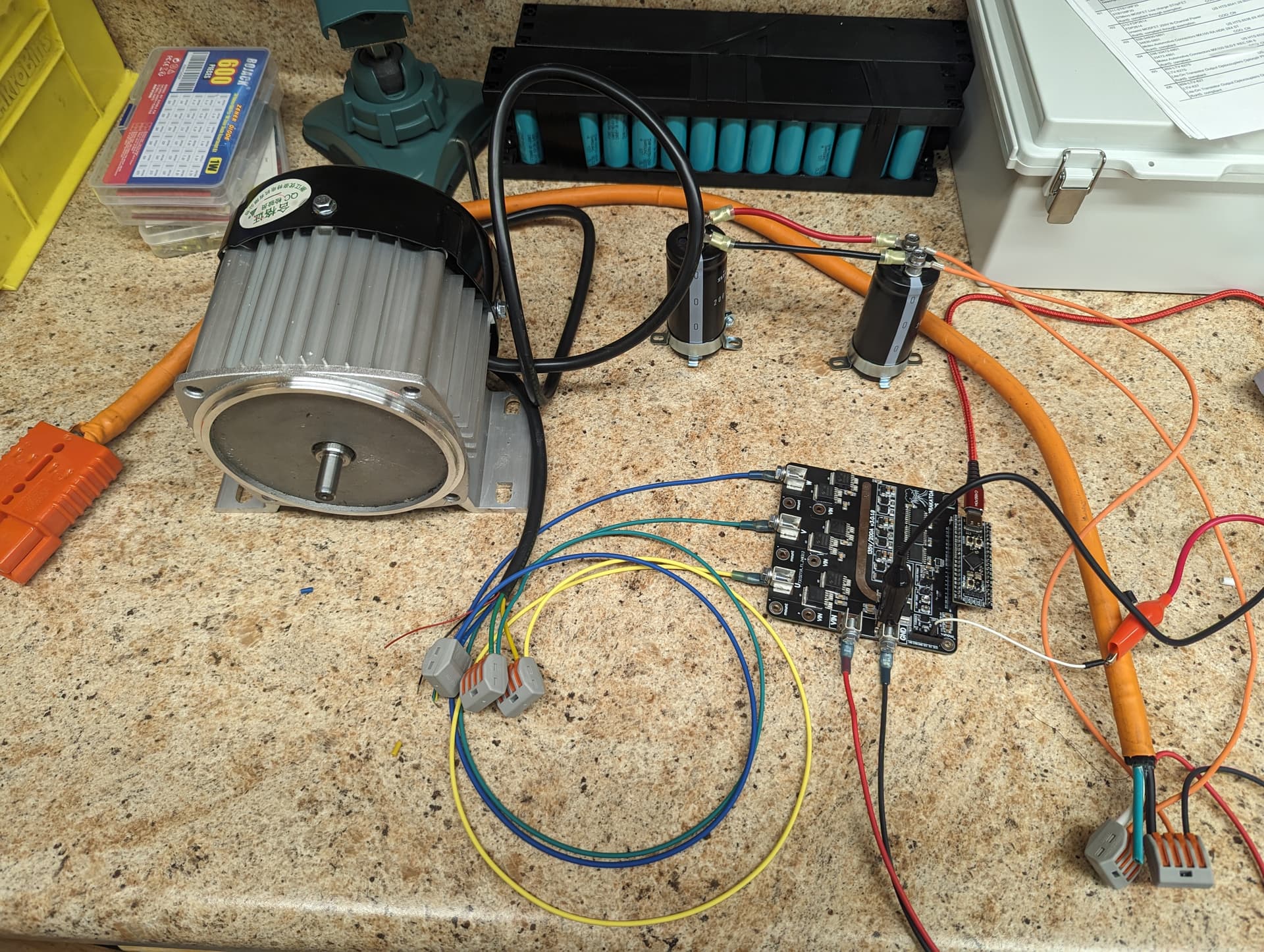
I added capacitance and the motor to see if maybe if I was misunderstanding a signal and needed some inductance or a load, this did not make a difference.
Mosfet pins are not shorted… Maybe I ruined the driver chips while soldering…?
12v present on R1, R10, and R12…
Common grounds between 3.3v and 12v supply… I do have a 48v battery hooked up. But my belief is I should see output waveforms without this.
Any pointers?