// zero electric angle not known
if(!_isset(zero_electric_angle)){
// Move 1 shaft rotation open loop (pole_pairs * 2 pi electric angle)
// create a look up table with a offset for each polepair
float sum[pole_pairs] = {};
int count[pole_pairs] = {};
for (int pp_i = 0; pp_i < pole_pairs; pp_i++) {
// for every pole we want ~ 20 measurements;
for ( int measure_i = 0; measure_i < 20; measure_i++) {
// for every measurement we want to take 20 steps to get to the next one
float angle = 0;
for (int i = 0; i <=20; i++ ) {
angle = _2PI * (measure_i * 20 + i) / 400.0f;
setPhaseVoltage(voltage_sensor_align, 0, angle);
_delay(1);
}
_delay(2);
sensor->update();
float sensorAngle = sensor->getAngle() * pole_pairs * sensor_direction;
float openLoopAngle = pp_i * _2PI + angle;
float angleOffset = sensorAngle - openLoopAngle;
monitor_port->println(angleOffset);
int bin = sensor->getMechanicalAngle() * pole_pairs / _2PI;
sum[bin] += angleOffset;
count[bin] += 1;
}
}
for (int pp_i = 0; pp_i < pole_pairs; pp_i++) {
zero_offset_nonlin[pp_i] = _normalizeAngle(sum[pp_i]/count[pp_i] - _PI_2);
}
if(monitor_port) {
for (int pp_i = 0; pp_i < pole_pairs; pp_i++) {
monitor_port->print(F("bin: "));
monitor_port->print(pp_i);
monitor_port->print(F(" sum: "));
monitor_port->print(sum[pp_i]);
monitor_port->print(F(" count: "));
monitor_port->print(count[pp_i]);
monitor_port->print(F(" mean: "));
monitor_port->println(zero_offset_nonlin[pp_i]);
}
}
zero_electric_angle = 0;
// stop everything
setPhaseVoltage(0, 0, 0);
_delay(200);
}else if(monitor_port) monitor_port->println(F("MOT: Skip offset calib."));
return exit_flag;
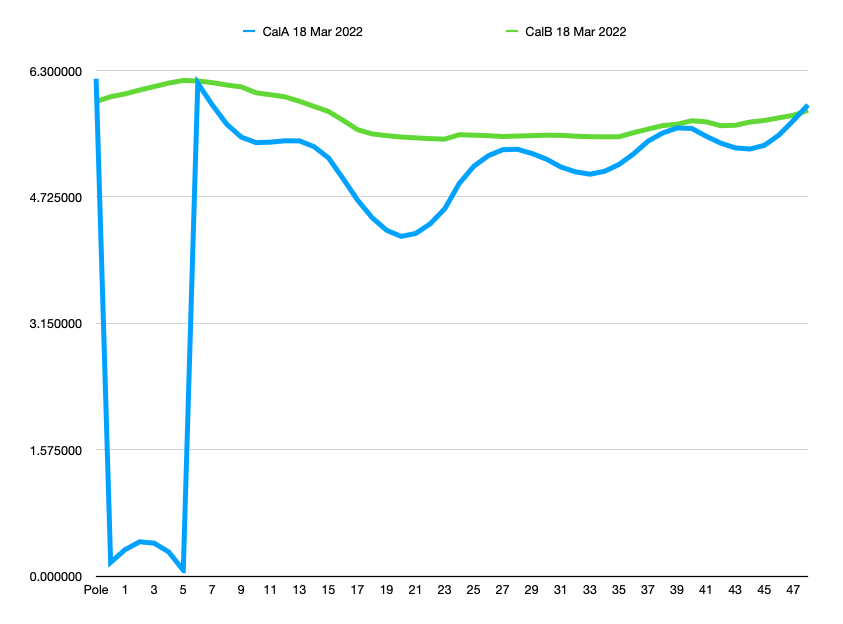
There is a small update to the algorithm. The calibration didn’t work before when the offset would wrap around / cross 2PI. Also improved the calibration in cases when the sensor direction is anticlockwise.
Example calibration