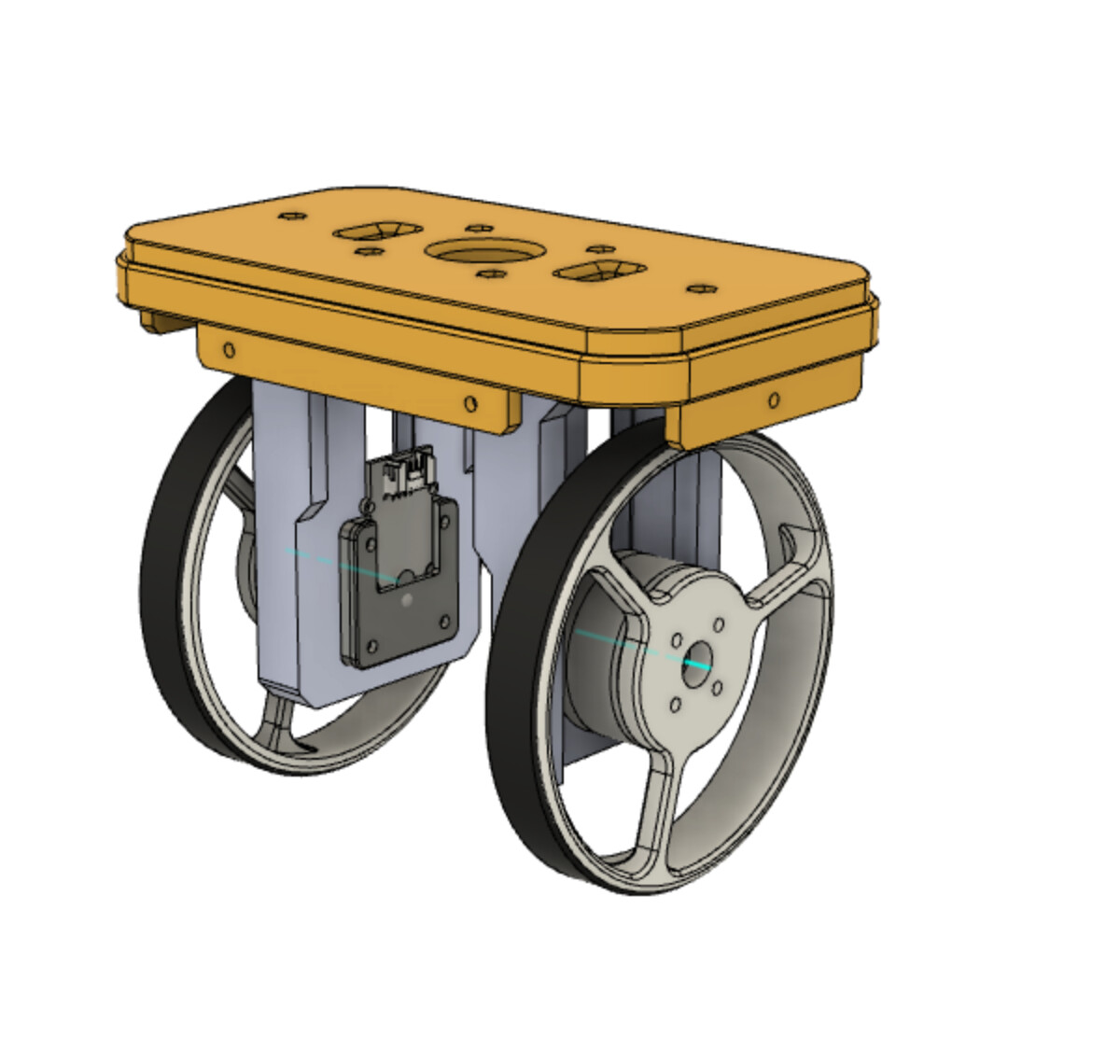
Funny timing ![]() I have managed to get my own self-balancing robot (pretty much) balancing in the last couple of days. It uses SimpleFOC (openloop-velocity mode) running on a 2-channel BGC gimbal controller connected to 2 gimbal motors, a 3d-printed frame and second arduino running the PID controller connected to a BNO055 IMU. Next steps are adding 2xAS5600 encoders and enabling proper FOC so I don’t melt the motors at low speed.
I have managed to get my own self-balancing robot (pretty much) balancing in the last couple of days. It uses SimpleFOC (openloop-velocity mode) running on a 2-channel BGC gimbal controller connected to 2 gimbal motors, a 3d-printed frame and second arduino running the PID controller connected to a BNO055 IMU. Next steps are adding 2xAS5600 encoders and enabling proper FOC so I don’t melt the motors at low speed.
Link: https://youtu.be/OLmSPBEftPM
Not sure yet but I might eventually replace the gimbal controller with 2x B-G431B-ESC1 connected over CANbus but the gimbal controllers are cheap and work eventually.
I haven’t opensourced anything yet (there are a lot of other examples out there) but let me know if you have any Qs and I will be happy to help you out if I can.