Thanks a lot @Antun_Skuric.
Here is what happens when I stop the motor by hand in voltage mode with target=3V:

Each time I stop the motor by hand, the current changes to a different mean value:

Once the motor is stopped by hand, if I turn it, the current is proportional to the motor angle. So, by turning it slowly and continuously, I can draw a nice wave:
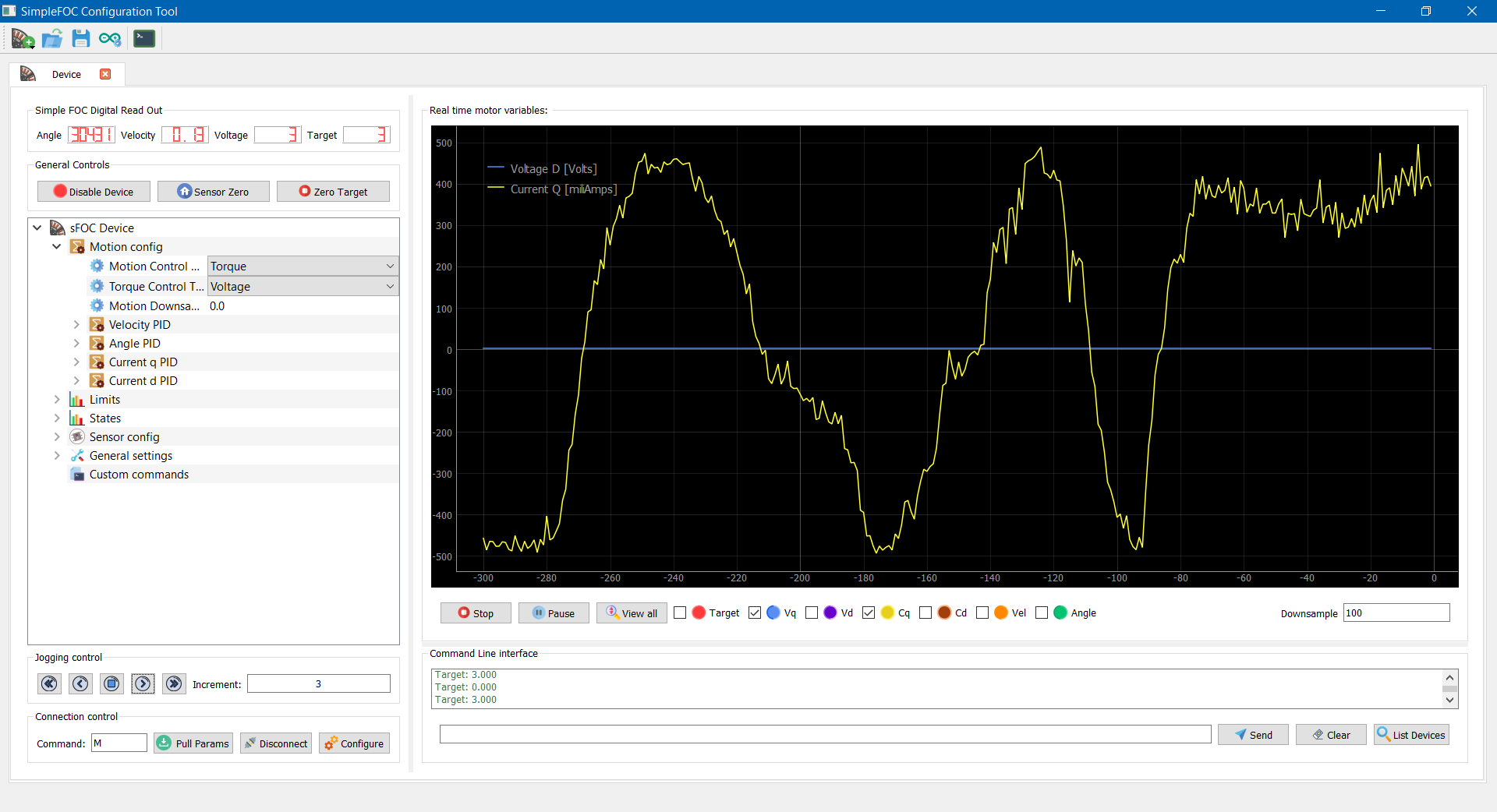
Is it the expected behavior?