Hi all.
I have been trying to use current torque control for quite some time now, but I have never been able to get current sensing to work. I have used all the other example codes with great success (Thanks for all the great work by the way) but I am having trouble with anything involving current sensing. This leads me to believe the problem is something in the hardware. However, the hardware seems straight forward. I am somewhat new to the community so if someone with more experience than myself wouldn’t mind looking at my setup to see if there is anything wrong, I would greatly appreciate it.
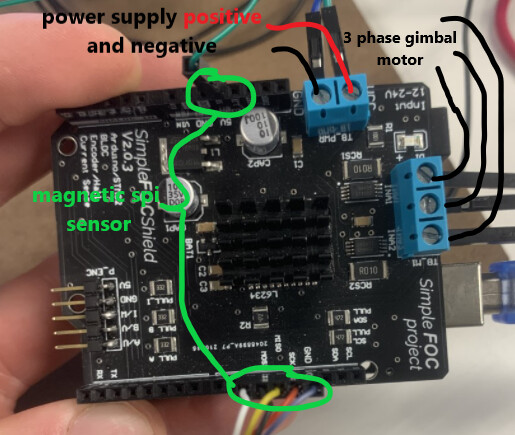
My hardware is a GM4108 ipower gimble motor and a Simple FOC shield v2.0.3
Here is the setup.

Here is the code.
#include <SimpleFOC.h>
// current sensor
// shunt resistor value
// gain value
// pins phase A,B
InlineCurrentSense current_sense = InlineCurrentSense(0.01, 50.0, A0, A2);
float current_magnitude;
LowPassFilter filter = LowPassFilter(0.001); // Tf = 1ms
void setup() {
// initialise the current sensing
current_sense.init();
// for SimpleFOCShield v2.01/v2.0.2
current_sense.gain_b *= -1;
Serial.begin(115200);
Serial.println(“Current sense ready.”);
}
void loop() {
PhaseCurrent_s currents = current_sense.getPhaseCurrents();
current_magnitude = current_sense.getDCCurrent();
filter.Tf = 0.01;
float filter_signal = filter(current_magnitude);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
// Serial.print(currents.a1000); // milli Amps
// Serial.print("\t");
// Serial.print(currents.b1000); // milli Amps
//Serial.print("\t");
//Serial.print(currents.c1000); // milli Amps
// Serial.print("\t");
// Serial.println(current_magnitude1000); // milli Amps
Serial.println(filter_signal); // milli Amps
}
This code only returns zero even when I back drive the motor.